

Experiment device capable of simulating variable loads and variable inertia of industrial robot joint
A technology of industrial robots and experimental devices, applied in the direction of manipulators, manufacturing tools, etc., can solve the problems of not having the functions of variable load and variable inertia, difficult disassembly and assembly during the process of variable inertia, and load changes that are not real-time, so as to achieve convenient installation and adjustment. Easy, easy-to-operate effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The present invention will be further described below in conjunction with accompanying drawing:
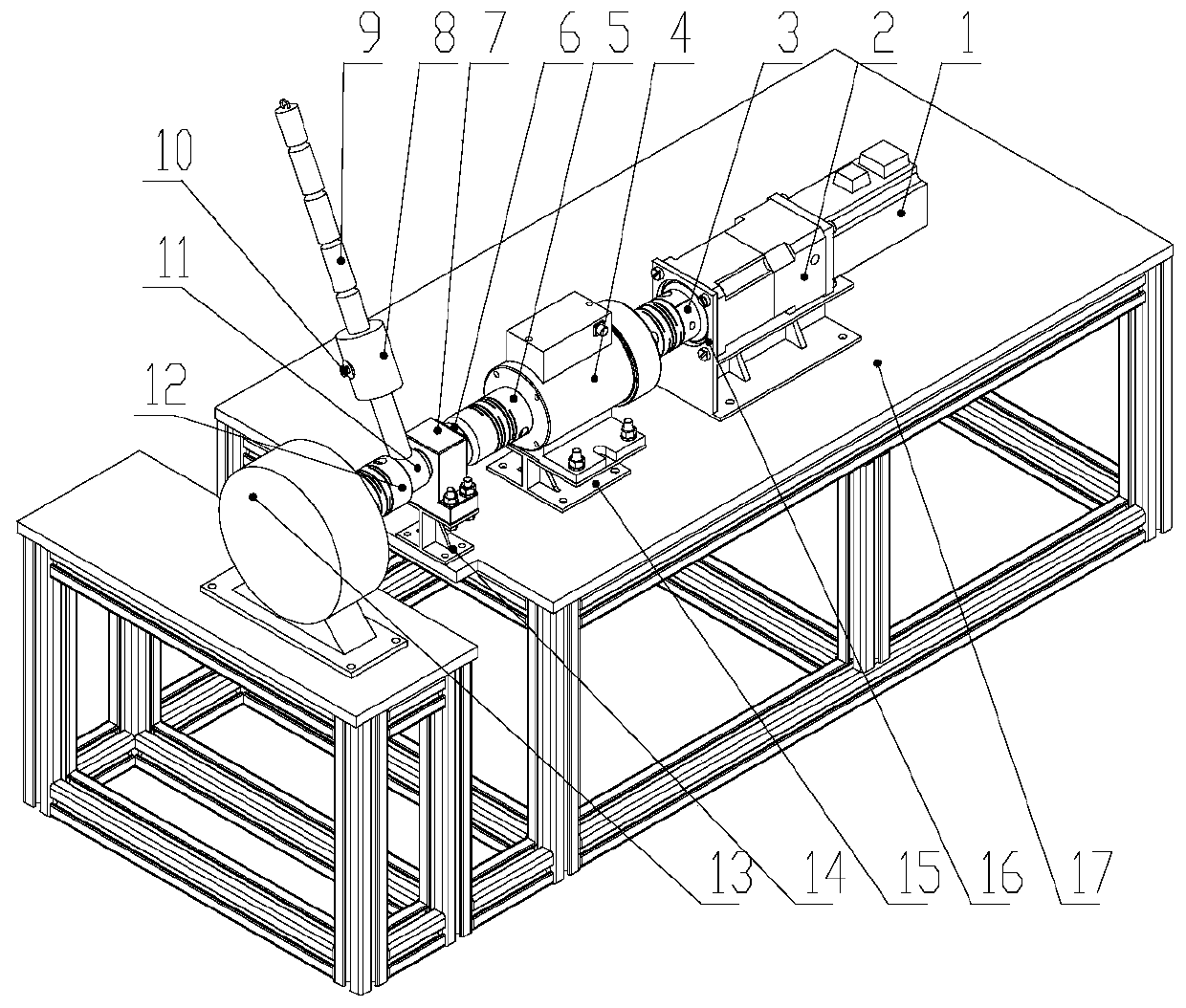
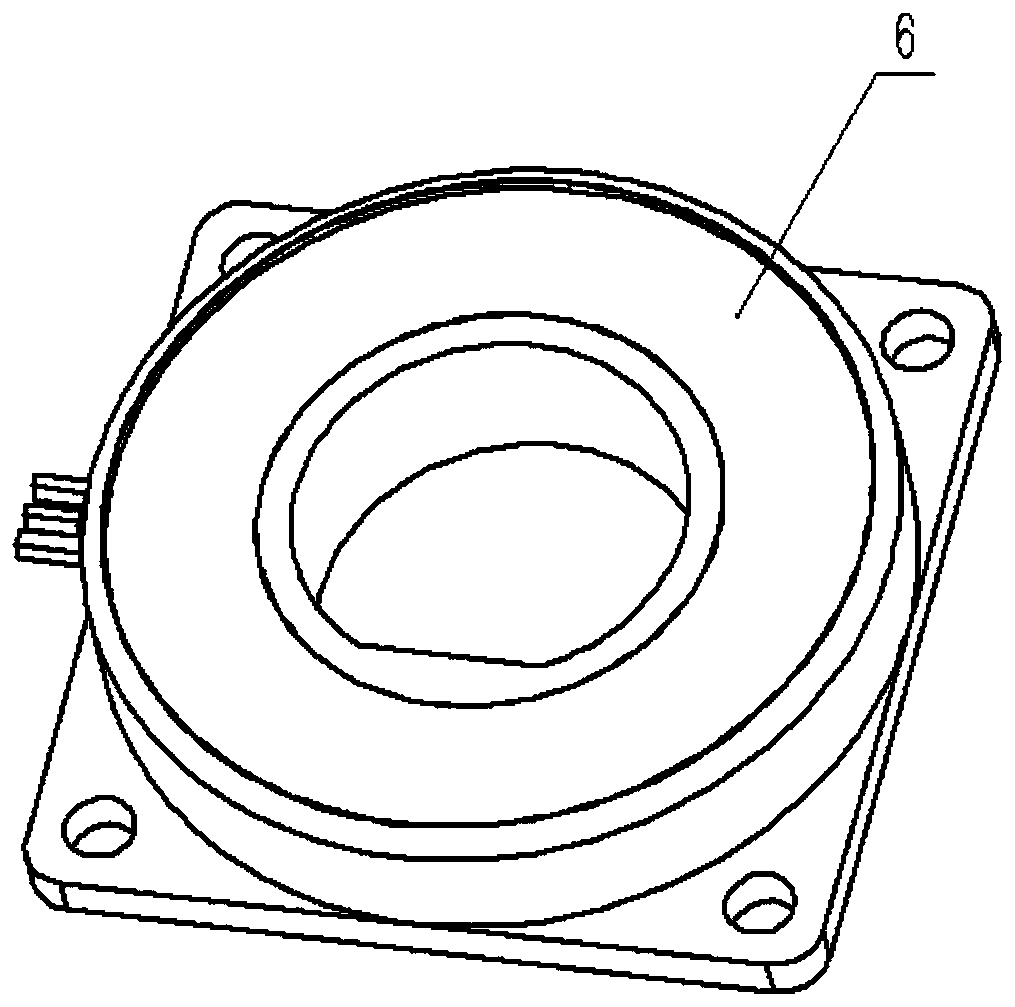
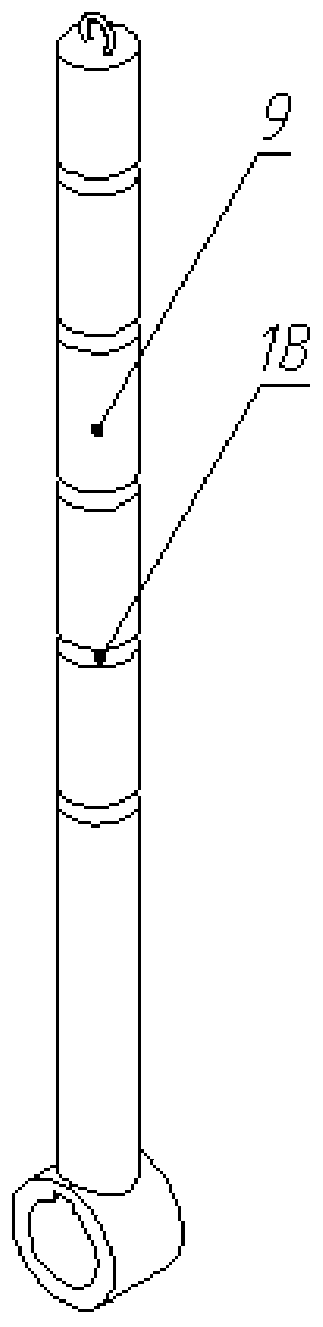
[0031] Such as Figure 1-8As shown, an experimental device for simulating the variable load and variable inertia of the joints of an industrial robot includes a worktable 17, an input servo motor 1, a planetary gear reducer 2, a first coupling 3, a dynamic torque sensor 4, and a second coupling 5. Angle sensor 6, double bearing housing 7, variable inertia lever arm 9, third coupling 12, rotating shaft 11, mass slider 8, positioning bolt 10, hysteresis dynamometer 13, first support base 14, the second Two support bases 15 and a third support base 16, the input servo motor 1 and the planetary gear reducer 2 are fixed on the third support base 16, and the output shaft of the input servo motor 1 is sequentially connected to the planetary gears distributed along a straight line Reducer 2, first coupling 3, dynamic torque sensor 4, second coupling 5, angle sensor 6, rotating sha...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More