

Experimental device for simulating single-joint dynamic variable load variable inertia of an industrial robot
A technology for industrial robots and experimental devices, applied in manipulators, manufacturing tools, etc., can solve the problems of complex structure, difficult control, and difficult to realize dynamic change of inertia, and achieve the effects of easy adjustment, convenient installation and simple operation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
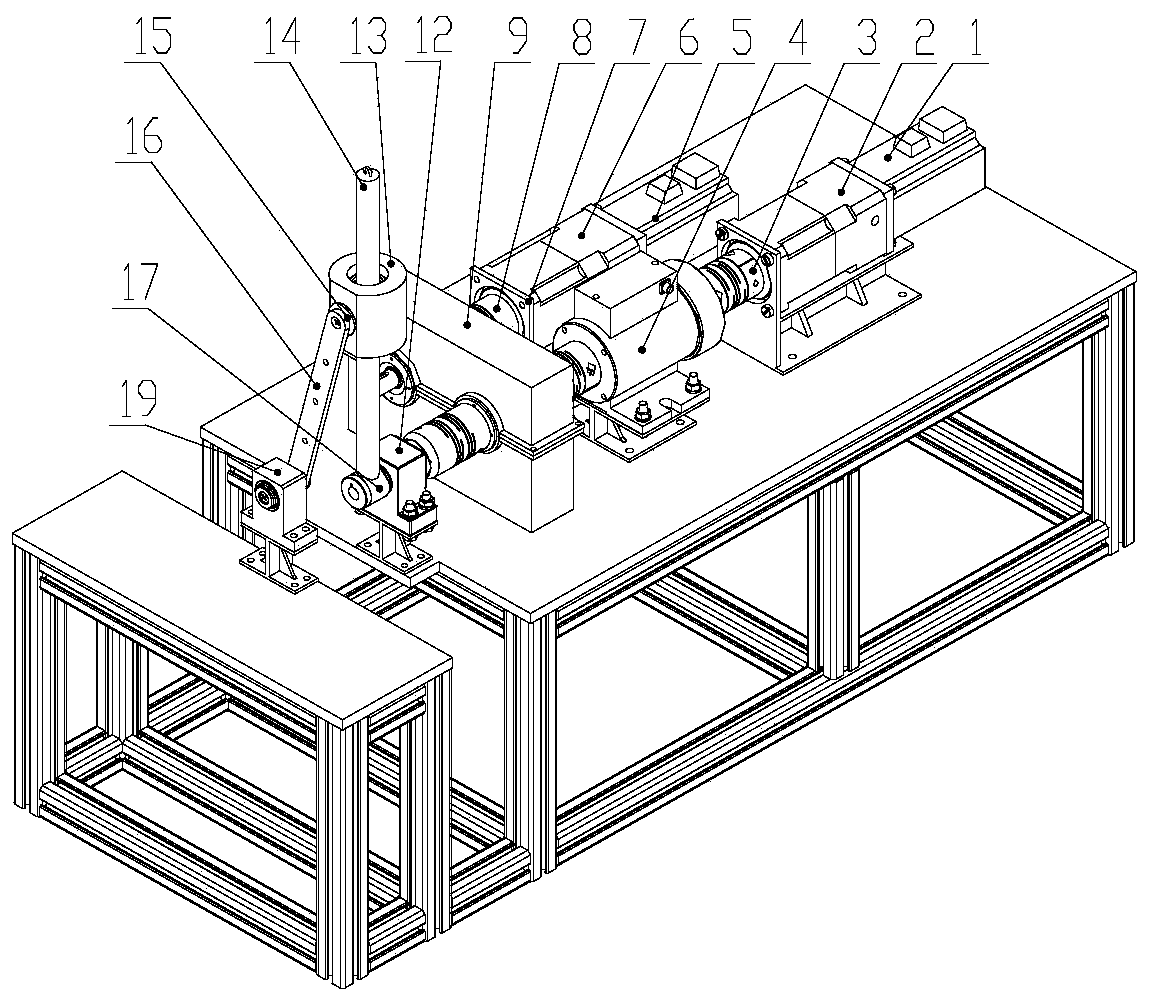
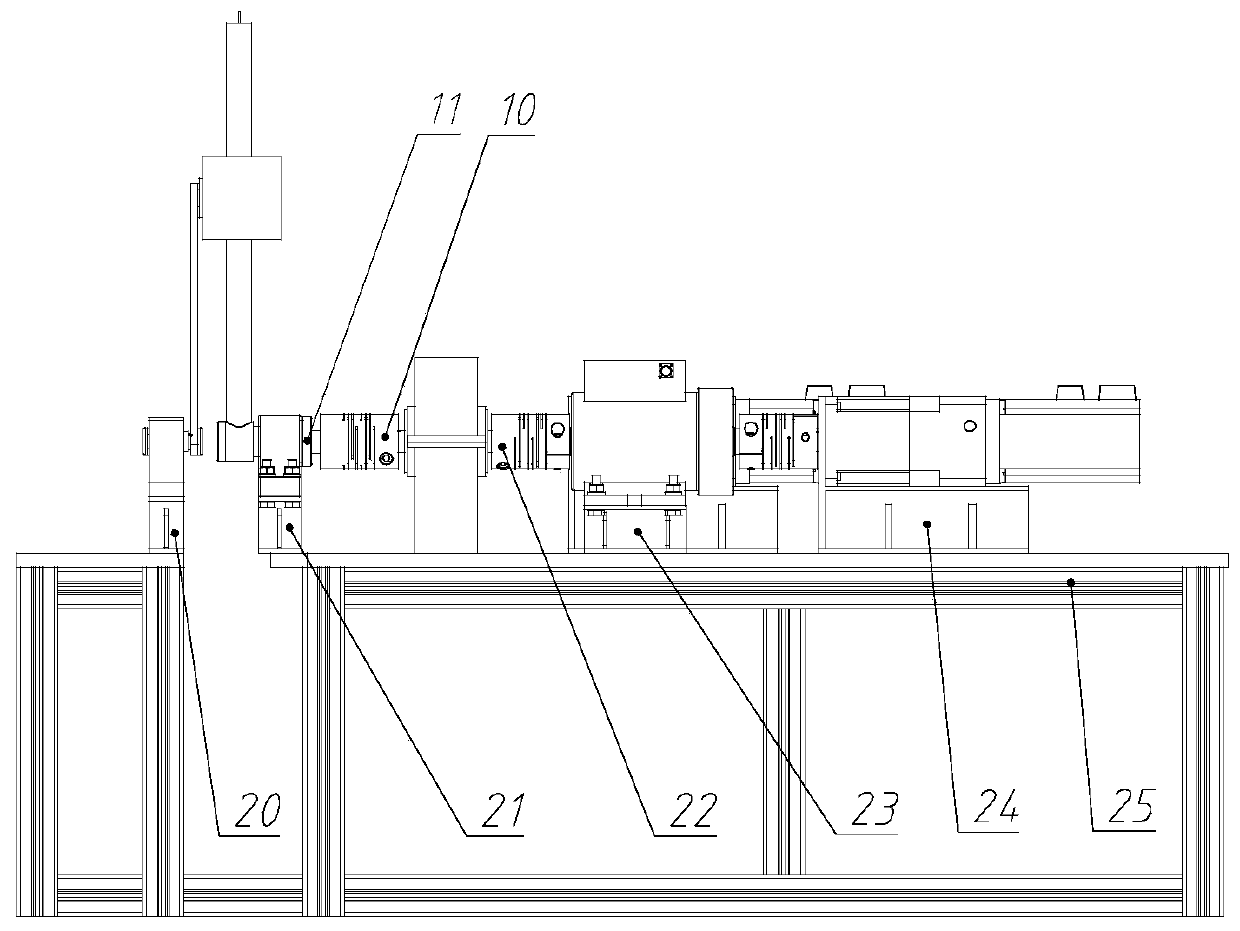
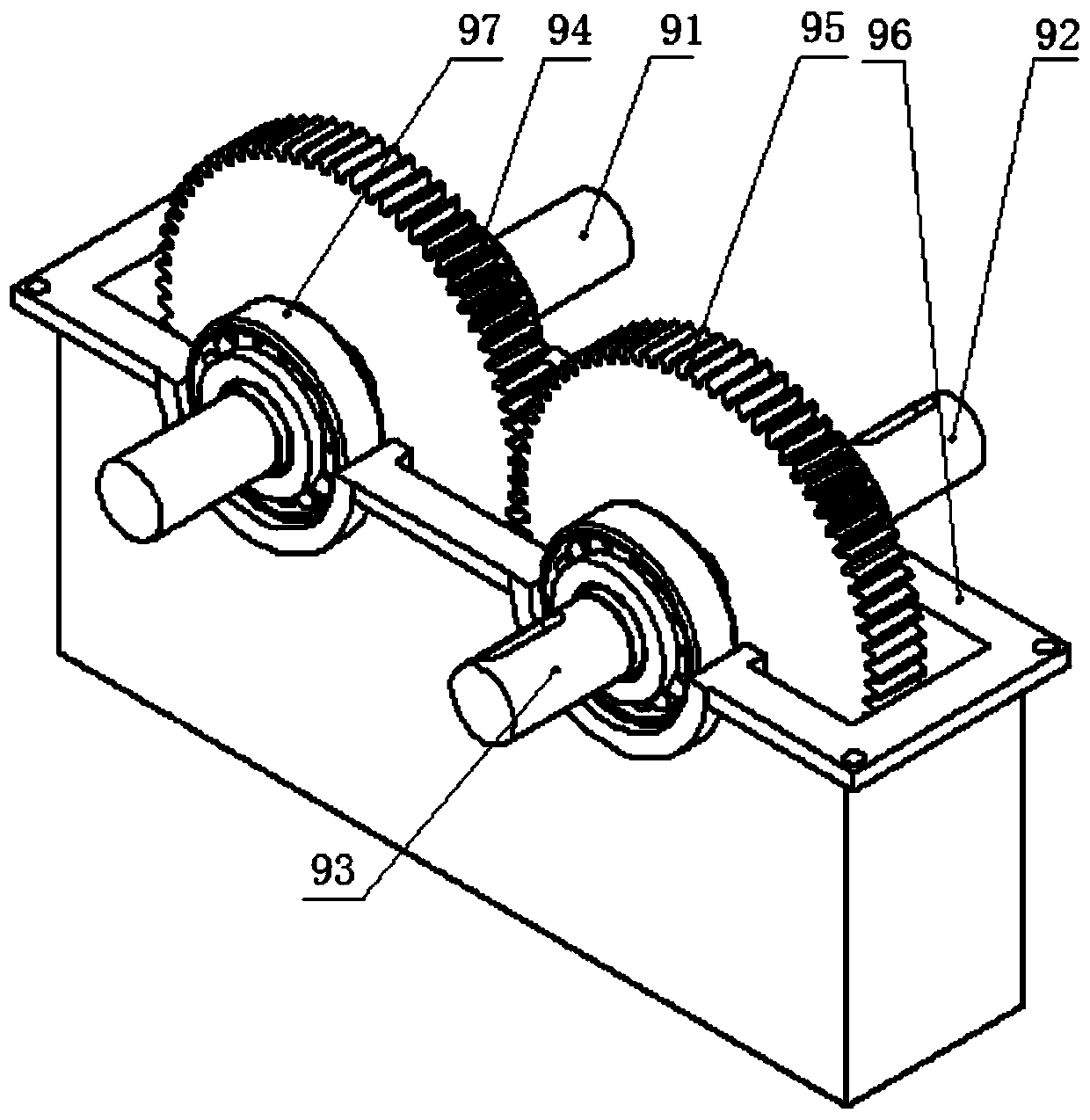
[0038] The present invention will be further described below in conjunction with accompanying drawing:
[0039] like Figure 1-10 As shown, an experimental device for simulating the dynamic variable load and variable inertia of industrial robot joints, the first frame 25, the second frame 26, the first input servo motor 1, the first reducer 2, the first coupling 3, Dynamic torque sensor 4, gear transmission box 9, second coupling 22, angle sensor 11, first double bearing housing 12, variable inertia lever arm 14, third coupling 10, rotating shaft 17, second input servo motor 5 , the second reducer 6, the fourth coupling 8, the mass slider 13, the swing arm 16, the second double bearing housing 19, the rotating shaft 18, the first support base 21, the second support base 23, the third support base 24. The fourth support base 7 and the fifth support base 20.
[0040] Both the first input servo motor 1 and the first reducer 2 are fixed on the third support base 24, and the outp...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More