A steering control method for a wheeled mobile robot
A mobile robot and steering control technology, which is applied to electric steering mechanisms, power steering mechanisms, steering rods, etc., can solve problems such as inability to cope and inability to realize in-situ steering operations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The implementation cases of the present invention will be described in detail below in conjunction with the accompanying drawings.
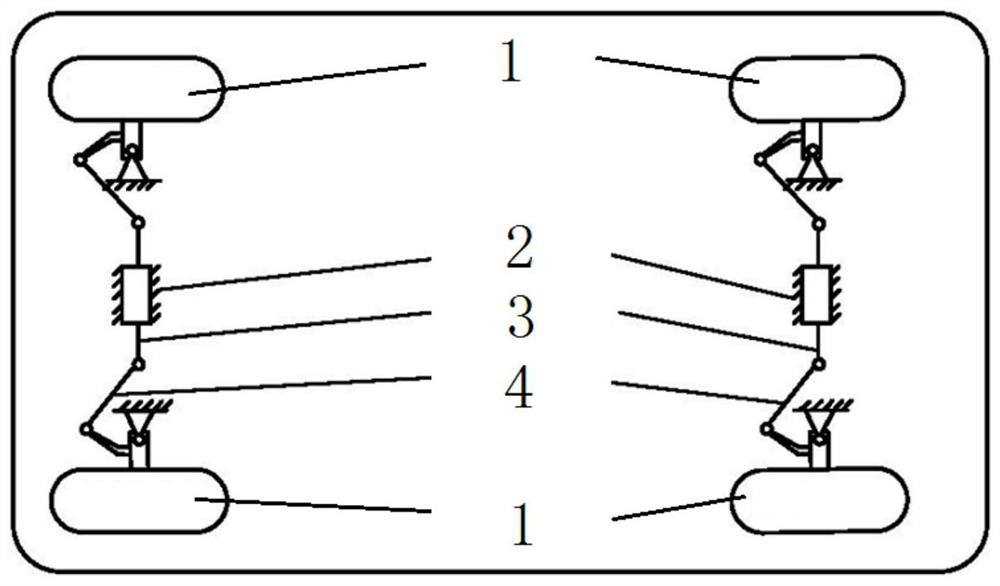
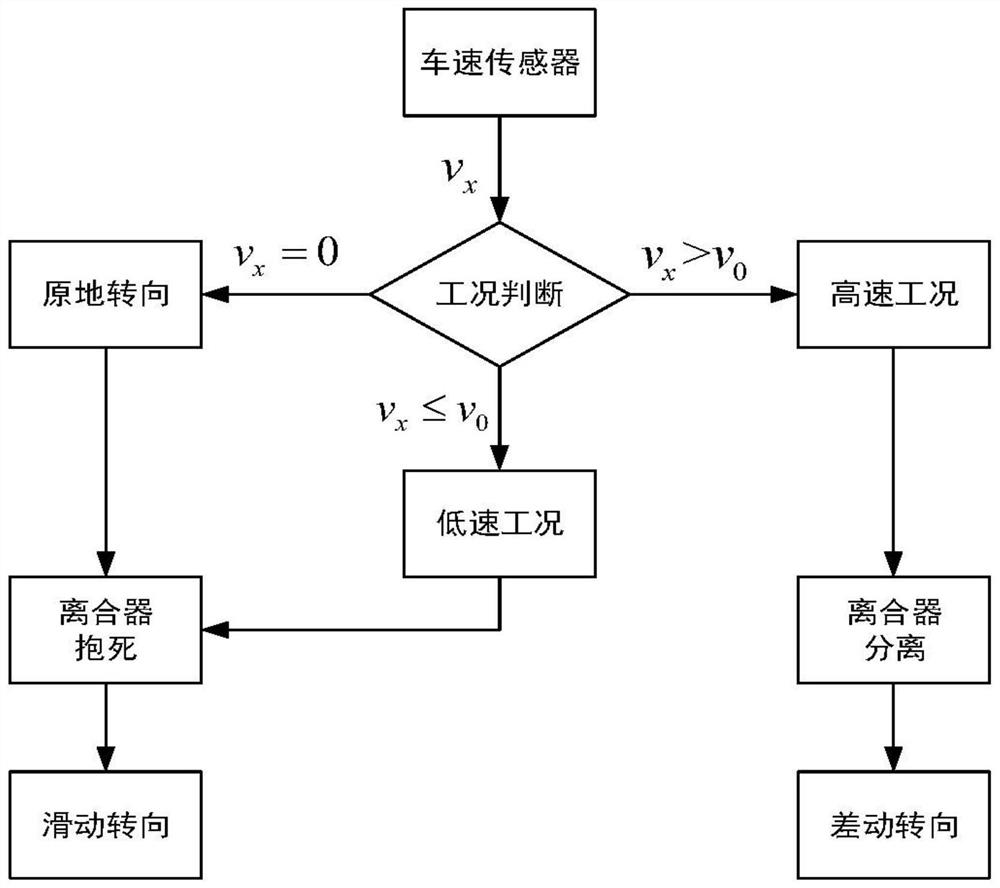
[0026] In order to achieve the best steering performance of the wheeled mobile robot under different working conditions, improve steering flexibility when turning in situ and low-speed steering, and maintain steering stability when turning at high speed, the present invention proposes a combination of sliding steering and differential steering. The advantageous wheeled mobile robot steering strategy solves the problem of steering instability due to the inability to provide sufficient driving torque difference due to slip steering during high-speed steering. A schematic diagram of the structure of a wheeled mobile robot driven by a wheel drive motor combined with sliding steering and differential steering. figure 1 shown. The flow chart of the steering strategy proposed by the present invention is as figure 2 As shown, the critical speed...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More