

Parking AGV path planning method based on improved ant colony algorithm
An ant colony algorithm and path planning technology, applied in vehicle position/route/height control, motor vehicles, vehicle parts, etc., can solve problems such as increasing task completion time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0088] The present invention will be further described below in conjunction with the accompanying drawings of the description.
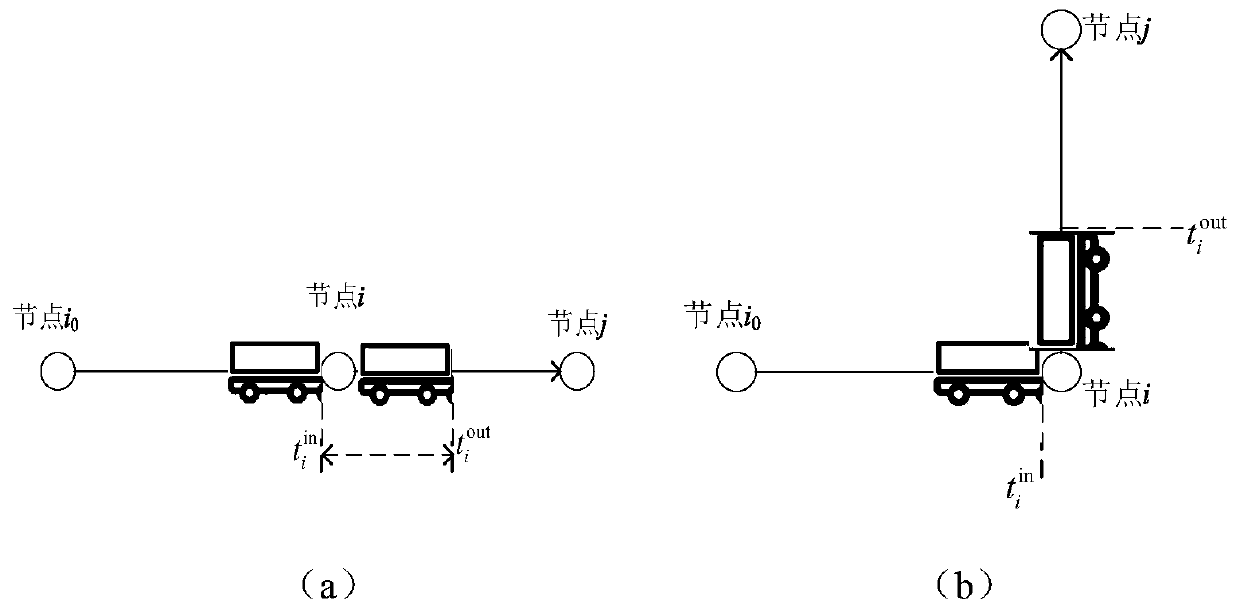
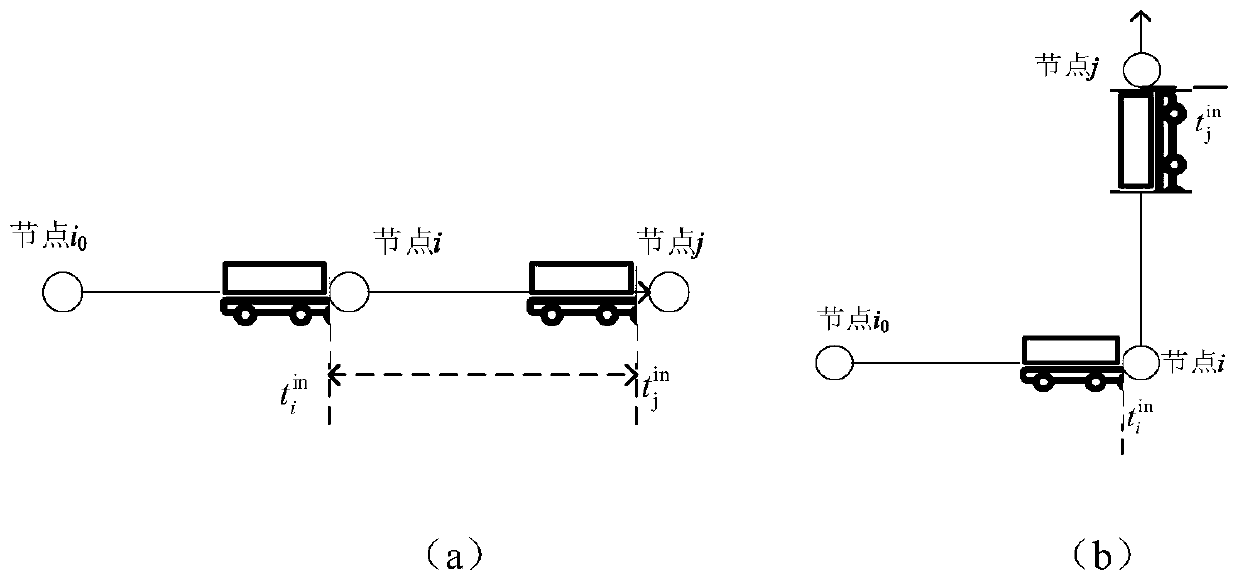
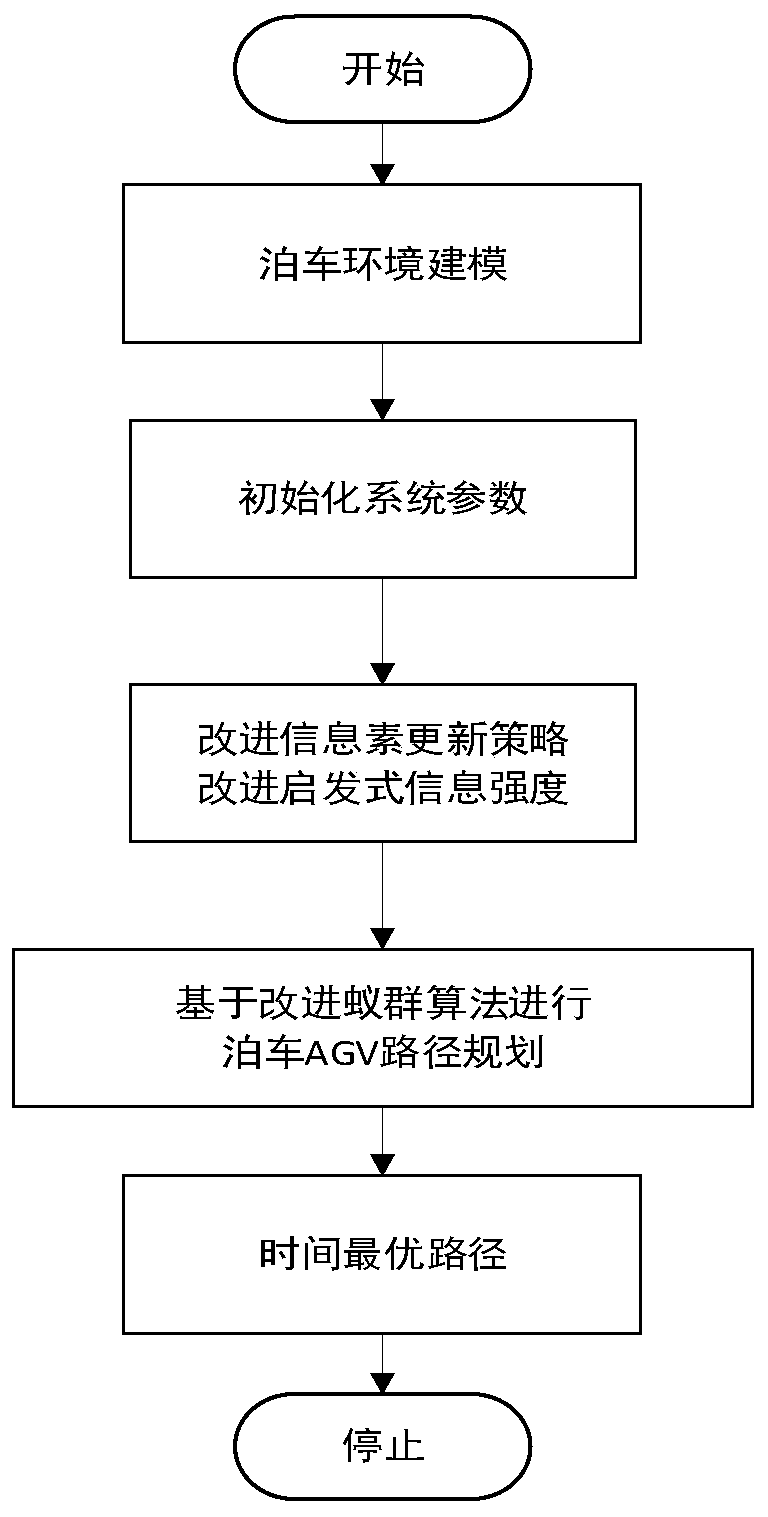
[0089] The invention discloses a parking AGV path planning method based on an improved ant colony. figure 1 It is a schematic diagram of AGV passing node i, where (a) is AGV passing node i in a straight line, and (b) is AGV turning and passing node i. figure 2 It is a schematic diagram of AGV passing node i to node j, where (a) is AGV passing through node i to j in a straight line, and (b) is AGV turning and passing node i to j. image 3 For the overall flowchart of the present invention's implementation, the specific content includes the following steps:
[0090] 1. Environment modeling, the steps are as follows:
[0091] ⑴: The parking lot environment where the parking AGV operates is abstracted into a weighted connection network G(V, E, W based on the topology method ij ), where V represents the set of edges composed of two connected nodes, E ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More