

Automatic crawling grinding robot for inner wall of circular pipe
A technology of automatic crawling and robots, which is applied to the parts of grinding machine tools, instruments, grinding machines, etc., can solve the problems of poor grinding quality, difficulty in grasping the angle of force, pollution, etc., to improve grinding efficiency, avoid grinding effects, and avoid manpower resource effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] The following examples are used to illustrate the present invention, but are not intended to limit the scope of the present invention. Unless otherwise specified, the examples are all in accordance with conventional experimental conditions. In addition, for those skilled in the art, on the premise of not departing from the spirit and scope of the present invention, various modifications or improvements to the material components and dosage in these embodiments all belong to the protection scope of the present invention.
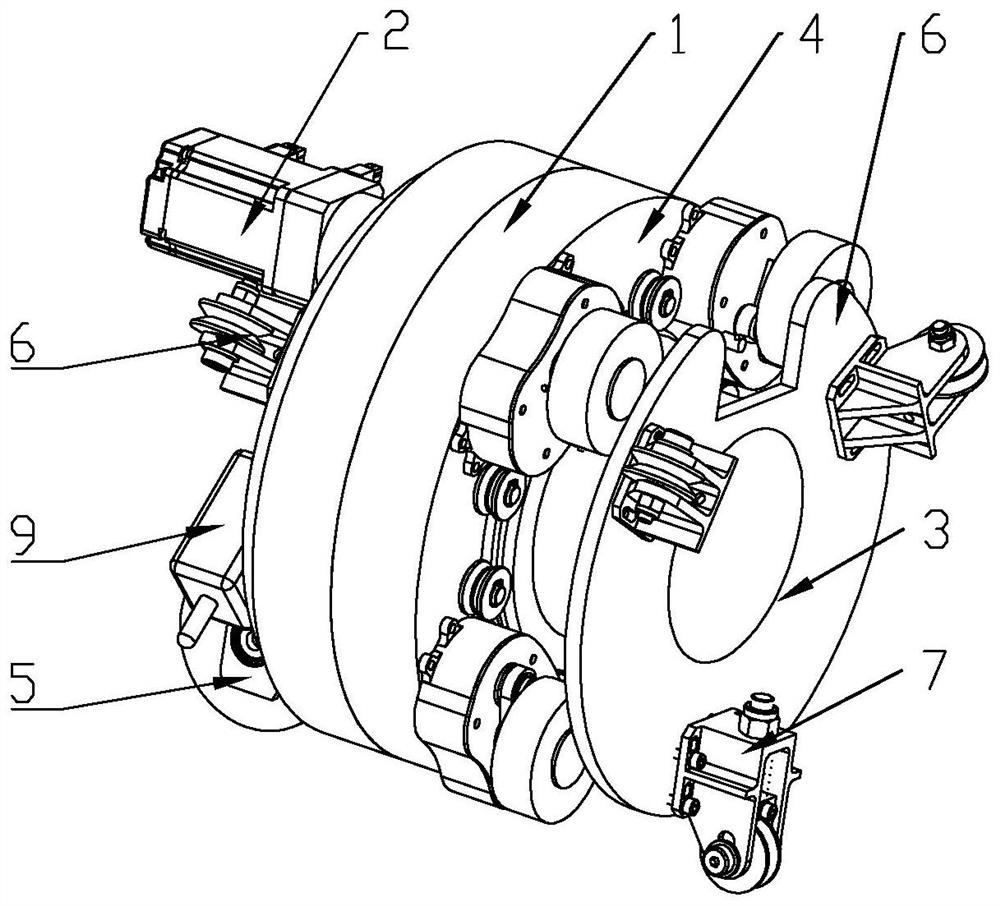
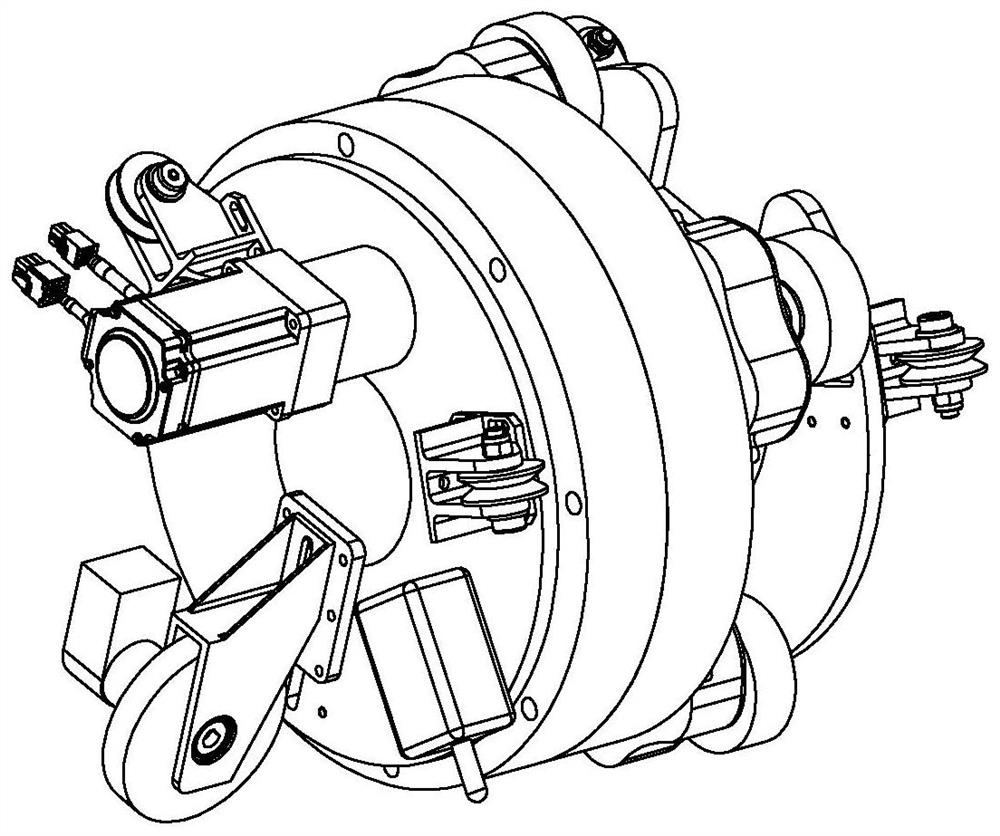
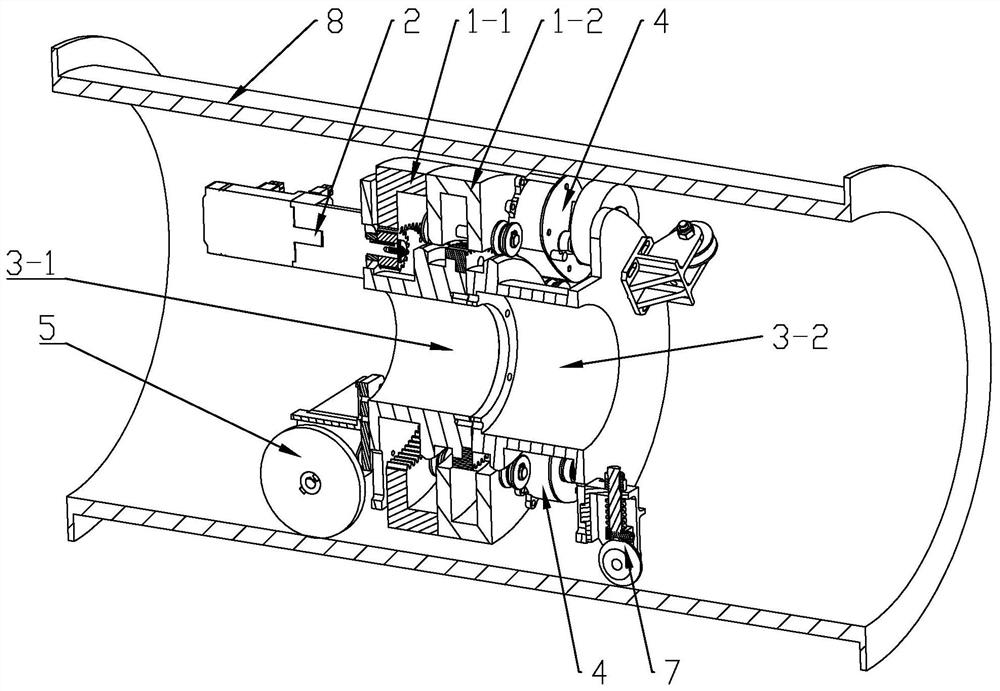
[0047] Such as Figure 1 to Figure 8 A circular tube inner wall automatic crawling and polishing robot is shown, which includes a housing 1, a main drive module 2, a driving base 3, a grinding module 4 and a crawling module 5, and the housing 1 includes a left side housing 1-1 and The right side housing 1-2, the drive base 3 includes a first drive base 3-1 and a second drive base 3-2, wherein:
[0048] The first drive base 3-1 includes a first retain...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More