

Translation pull-in type mechanical claw for recycling AUV
A mechanical claw, in-type technology, applied in the field of automation, can solve the problems of low work efficiency, easy damage of the mechanical claw, and difficulty in adapting to a variety of different sizes and postures, and achieves simple structure, high degree of freedom, clamping and relaxation. Highly controllable effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
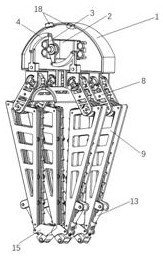
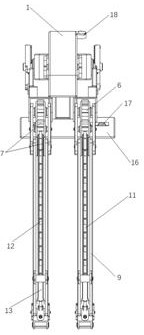
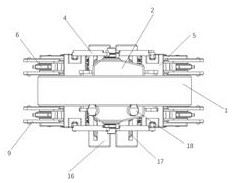
[0027] see Figure 1-6 , the present invention provides a technical solution: a translational pull-in mechanical claw for recovering AUVs, including a semicircular shell 1, a steering gear body 2, a steering gear intermediate transmission mechanism 3, a crescent transmission mechanism 4, a sliding part 5, and a main driving wheel 6. From the driving wheel 7, the driving wheel housing 8, the triangular mechanical claw 9, the pulley 10, the crawler belt 11, the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More