

Industrial robot based on Internet of Things
A technology of industrial robots and the Internet of Things, applied in the field of robots, can solve the problems of difficult work, peeling paint on the inner surface of the pipeline, easy rust, etc., to ensure the relative stability, improve the paint repair efficiency, and improve the sealing effect.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach
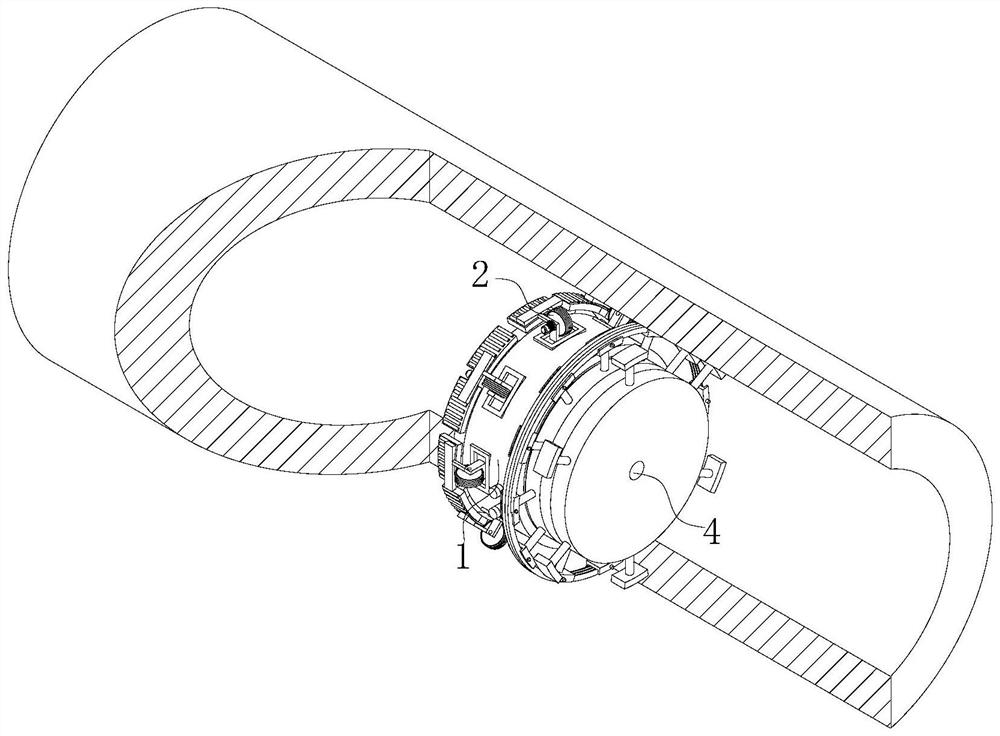
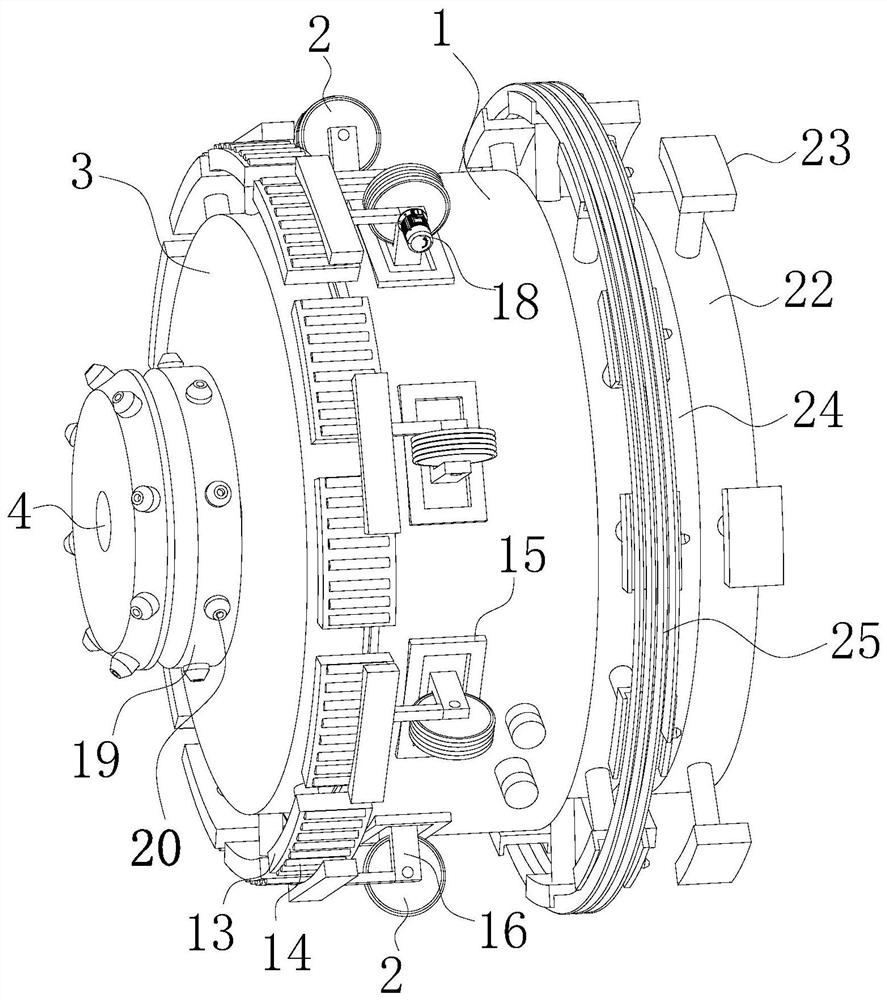
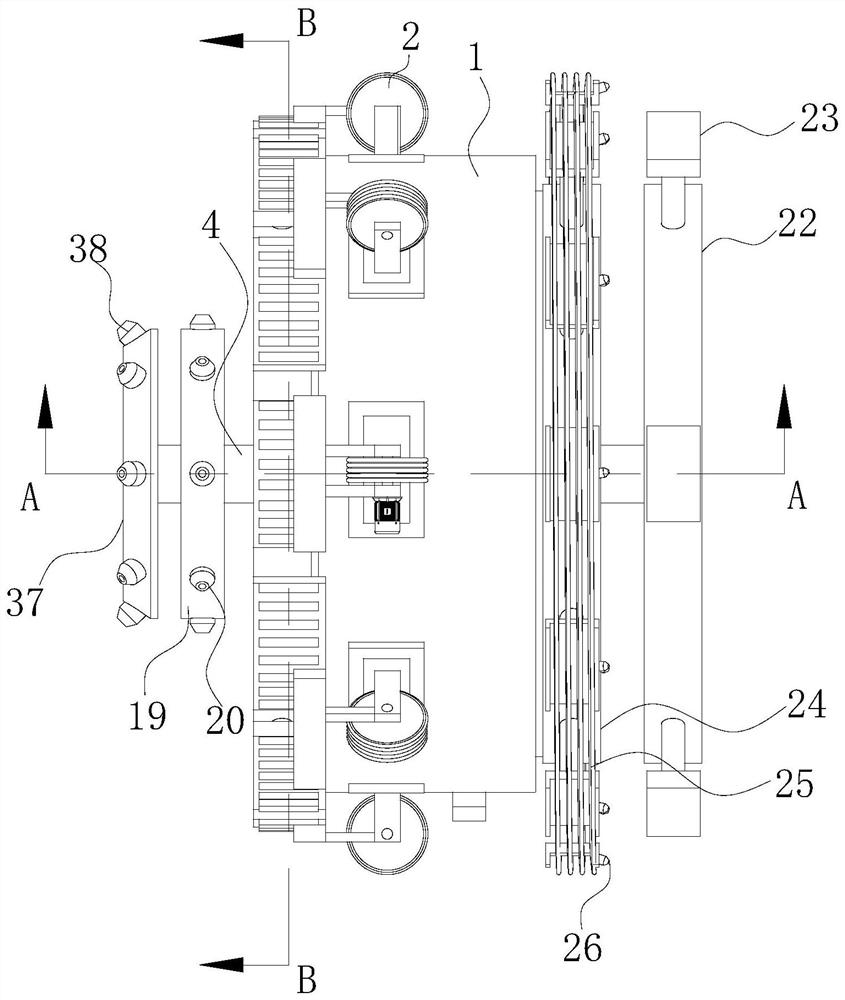
[0027] As an embodiment of the present invention, the surface of the rotating column 4 is provided with a second adjusting dial 22 on the right side of the fixed plate 1, and the working principle of the second adjusting dial 22 is the same as that of the first adjusting dial 3; The surface of the second adjusting turntable 22 is fixedly connected with evenly arranged polishing blocks 23; during work, by setting the second adjusting turntable 22, the rotation of the second motor 7 will drive the stem 6 to rotate, and the stem 6 will drive the second adjustment simultaneously. The rotation adjustment of the internal parts of the turntable 22 realizes the position movement of the grinding block 23 evenly arranged on the surface of the second adjustment turntable 22, so that the grinding block 23 can be effectively fitted with the inner surface of the pipe with different inner diameters, and then the rotating column 4 will Drive the second adjustment dial 22 to rotate, and then re...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More