

Gait training method and device for lower limb rehabilitation robot and lower limb rehabilitation robot
A rehabilitation robot and gait training technology, applied in the field of rehabilitation robots, can solve the problems of poor training effect of patients and achieve the effect of reducing movement restrictions and good training effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
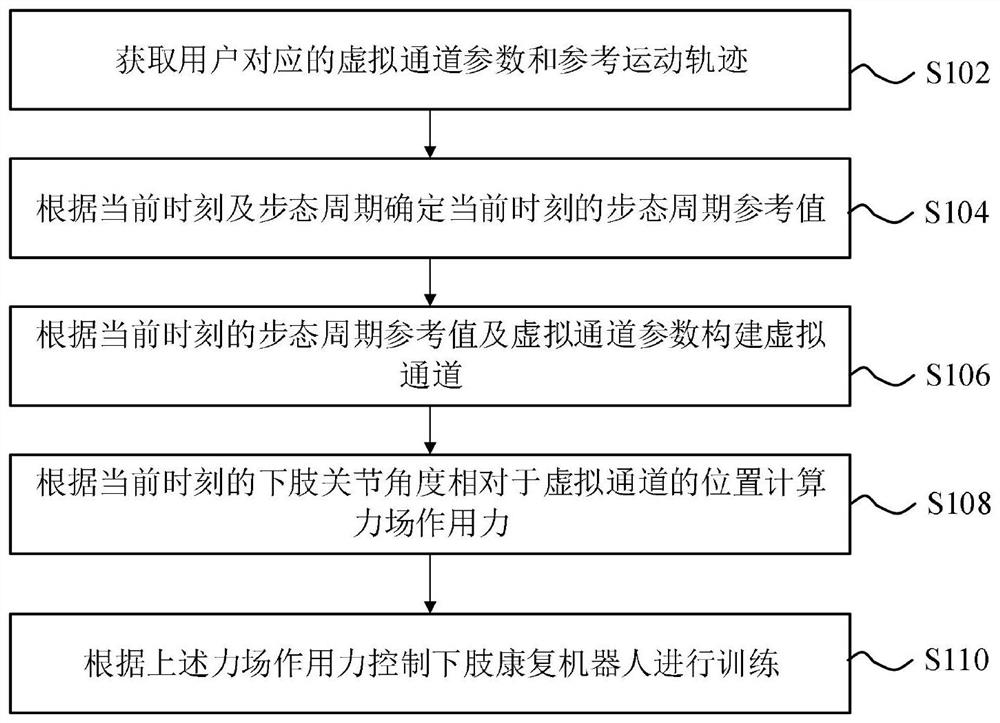
[0041] In order to make the above objects, features and advantages of the present invention more comprehensible, specific embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
[0042] The design principle of the active training mode is "Assist as Needed" (AAN, Assist as Needed), that is, to provide only the necessary support to ensure safety without restricting the user's movement. In order to motivate the user to participate actively, In this mode, the robot will provide as little auxiliary force as possible, and the user needs to actively exert force to complete the rehabilitation action together. However, the existing gait training methods for lower limb rehabilitation robots do not meet this requirement.
[0043]There is a three-dimensional gait rehabilitati...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More