

Dipolar coordinate four free degrees parallel robot based on dual-worm
A bipolar coordinate, double worm technology, applied in manipulators, program-controlled manipulators, medical sciences, etc., can solve the problems of difficult clinical application of robots, inconvenient operation of doctors, and small surgical posture range, and reduce the calculation and programming. Effects of difficulty, light weight, and increased range of motion of joints
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach
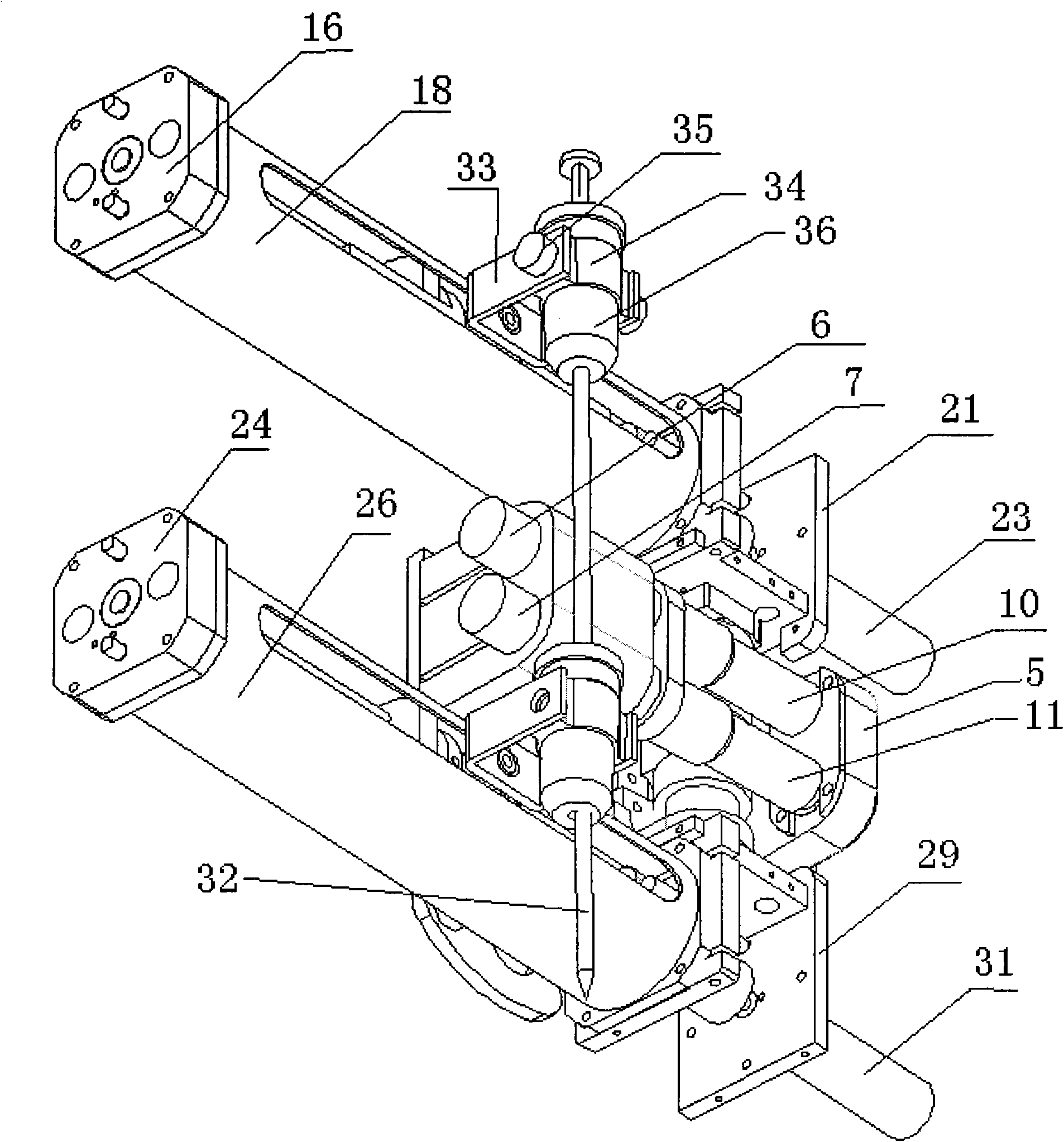
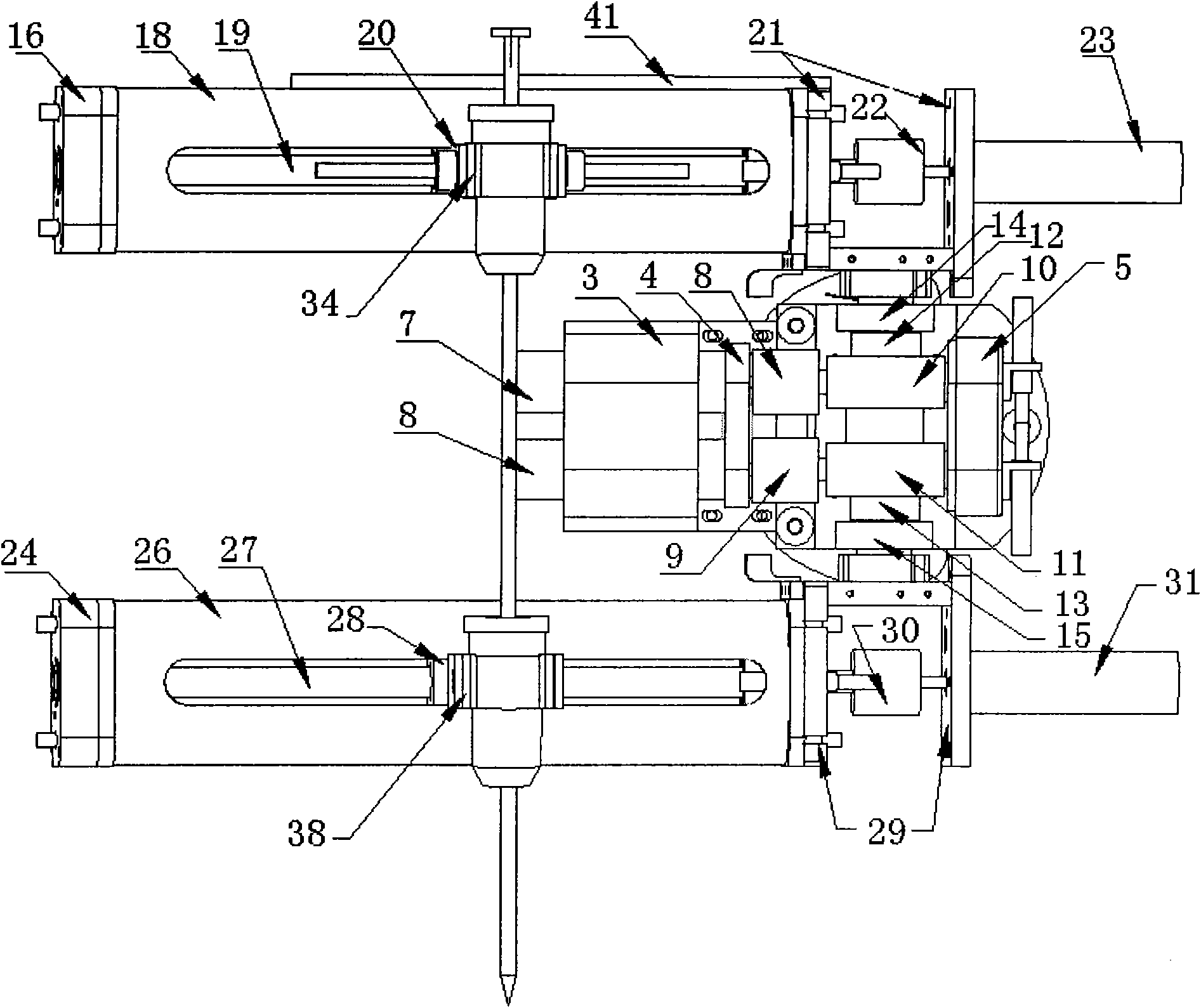
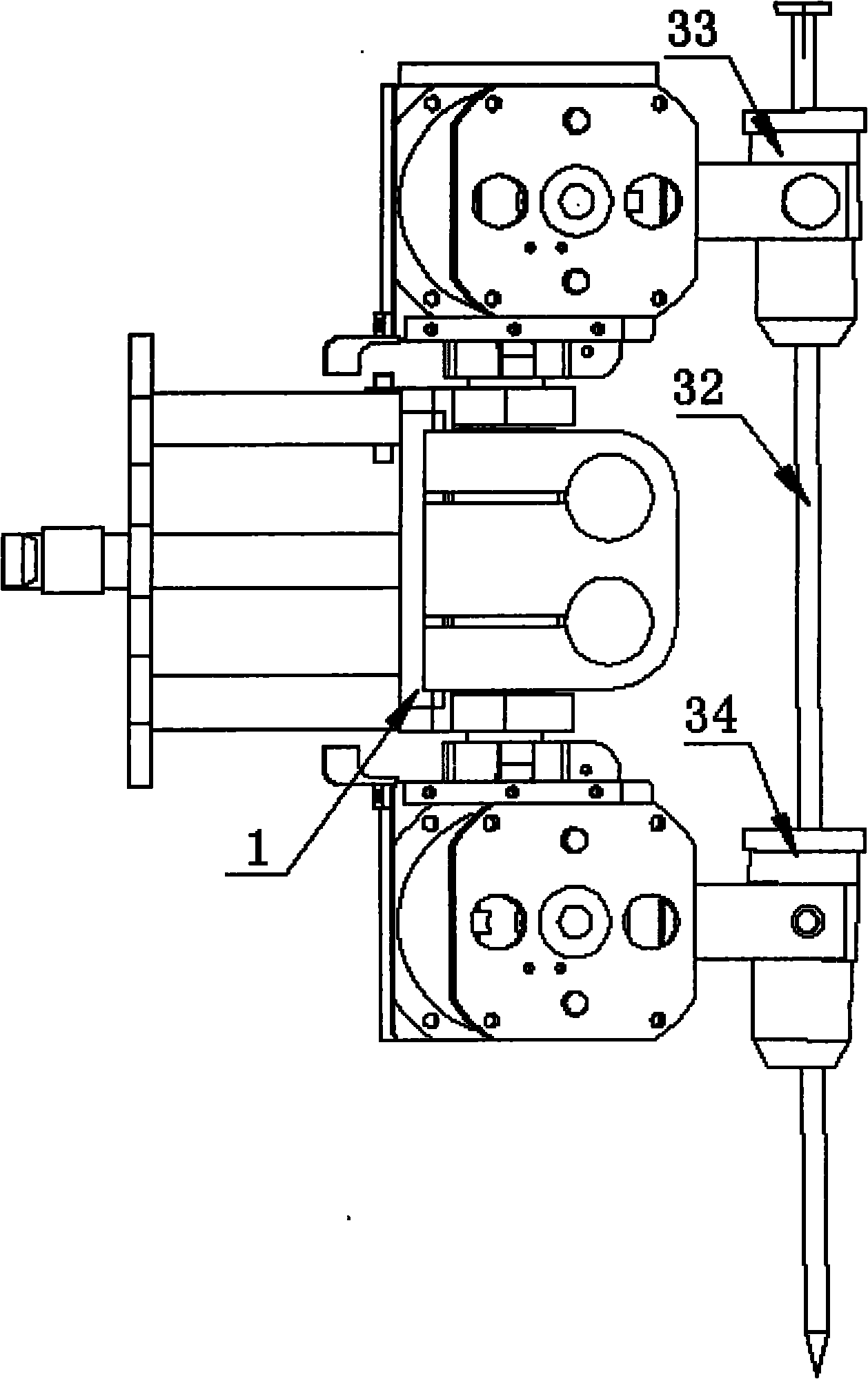
[0044] figure 1 It is a schematic diagram of a three-dimensional structure of an embodiment of the present invention; figure 2 It is a front view of an embodiment of the present invention; image 3 It is a left side view of an embodiment of the present invention; Figure 4 It is a top view of an embodiment of the present invention.
[0045] Such as Figure 1 to Figure 4 Shown: a bipolar coordinate four-degree-of-freedom parallel robot based on a double worm, including an upper screw mechanism, a lower screw mechanism, a puncture needle mechanism, a double worm transmission mechanism, a main connecting plate 1, a parallel platform fixing frame 2 and a support frame ( not set forth in the present invention), wherein, the main connecting plate 1 is the basic part of the present invention as a part of the static platform of the parallel platform, and the three-claw structure provided at one end of the parallel platform fixing frame 2 is rigid with the main connecting plate 1 b...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More