

Unified model of catadioptric omnidirectional camera and calibration method thereof
A catadioptric and camera technology, applied in image data processing, instruments, computing, etc., can solve problems such as complex imaging models, tangential distortions that cannot be compensated, and unsatisfactory calibration results
Inactive Publication Date: 2013-08-28
ZHEJIANG UNIV
View PDF2 Cites 22 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Document 3 (C.Mei and P.Rives, "Single View Point Omnidirectional Camera Calibration from Planar Grids," in Robotics and Automation, 2007IEEE International Conference on, 2007) added tangential distortion to compensate for misalignment based on the unified model , but the tangential distortion can only compensate for a small misalignment, and the tangential distortion cannot be compensated when the misalignment is large, so that the calibration result is not ideal when the misalignment is large
Document 4 (Z.Xiang, B.Sun, and X.Dai, "The Camera Itself as a Calibration Pattern: A Novel Self-Calibration Method for Non-Central Catadioptric Cameras," Sensors12, 7299-7317(2012).) No The non-single-view catadioptric camera is regarded as a whole, but the mirror surface and the perspective camera are regarded as two parts. Calibrating the catadioptric camera is to calibrate the direct pose relationship between the mirror surface and the perspective camera. This method uses the edge of the mirror surface and the perspective camera lens Imaging is used to calibrate the pose relationship, but the imaging model of this method is complex, and the internal parameters of the perspective camera need to be calibrated offline
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples

Examples
Experimental program
Comparison scheme
Effect test
Embodiment
[0083] Catadioptric camera consists of H3S hyperbolic mirror (a=0.0281m, b=0.0234m) and SONYXCD-SX910CR camera (f x =1455, f y =1459,α=0,u 0 =639.2, v 0 =482.2, resolution 1280×960). The catadioptric camera collects 20 checkerboard images with a grid number of 7×10 (the number of intersection points is 6×9).
[0084] Select the mirror edge in the image, and calculate the center of the mirror edge as (u 0 ,v 0 ) initial value (u 0 =615.7, v 0 =443.9), select four points on the same line in the image to calculate the initial value of γ=374.5. At this point, the initial values of the internal parameters of the model have been obtained.
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
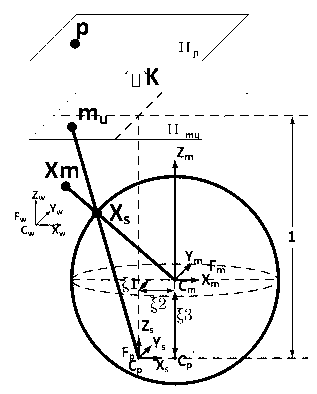
The invention discloses a unified model of a catadioptric omnidirectional camera and a calibration method thereof. The unified model of the catadioptric omnidirectional camera is formed by a virtual unit ball, a virtual viewpoint, a normalization plane and an imaging plane. On the basis of the unified model, a plurality of calibration plate images acquired through the catadioptric omnidirectional camera are utilized to calibrate the parameters of the model and the pose relationship between a calibration board and the catadioptric omnidirectional camera. On the condition that misalignment of the catadioptric omnidirectional camera exists, precision of the model is far higher than that of a unified imaging model of a traditional single view point catadioptric camera. Compared with other non-single-view-point imaging model, the model is simple in imaging model, strong in operability, quick in optimizing speed, and good in precision and noise-resistant performance. The calibration method is high in accuracy and convenient to operate, and is quick in non-linear optimized speed due to original value calculation.
Description
technical field [0001] The invention relates to image data and a processing and analyzing method, in particular to a unified model of a catadioptric omnidirectional camera and a calibration method thereof. Background technique [0002] The field of view of traditional cameras is small, generally not greater than 180 degrees. In order to make up for this deficiency, researchers have proposed different types of cameras with large fields of view in recent years, among which the catadioptric omnidirectional camera with a 360-degree field of view is widely used in robots. Navigation, video conferencing, video surveillance and scene reconstruction and other fields. The catadioptric omnidirectional camera is composed of an axisymmetric rotating mirror and an ordinary perspective camera. The light from the object enters the perspective camera after being reflected by the mirror. Different mirrors can form catadioptric omnidirectional cameras with different characteristics. [0003...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More Patent Type & AuthorityApplications(China)
IPC IPC(8): G06T7/00
Inventor项志宇戴行马子昂
OwnerZHEJIANG UNIV