

A humanoid lower limb based on pneumatic muscles
A technology of pneumatic muscles and lower limbs, applied in the field of bionic robots, can solve problems such as the inability to control attitudes in multiple directions in the system space, and achieve the effects of compact structure, good flexibility, and high power/mass ratio
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
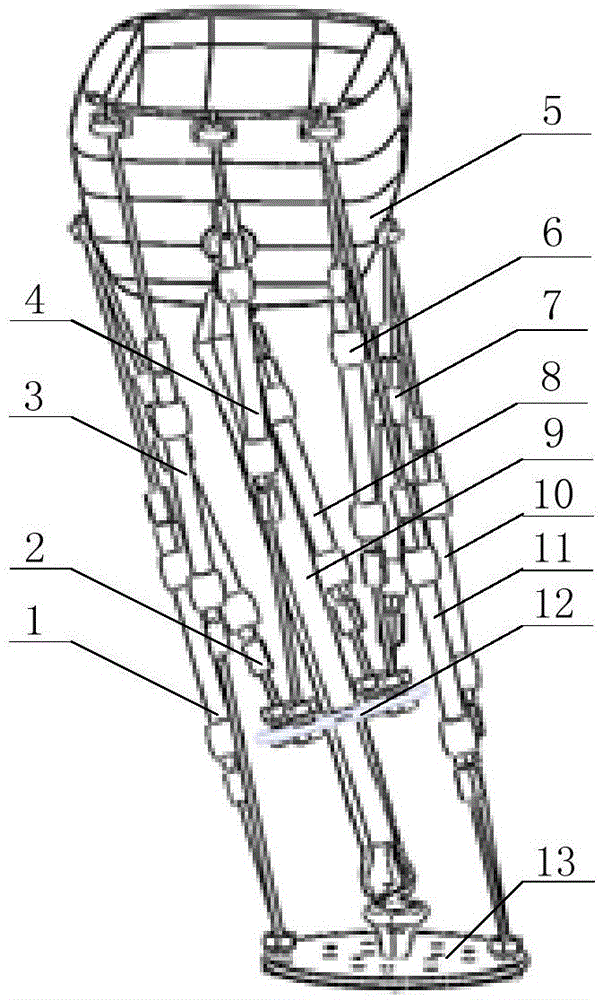
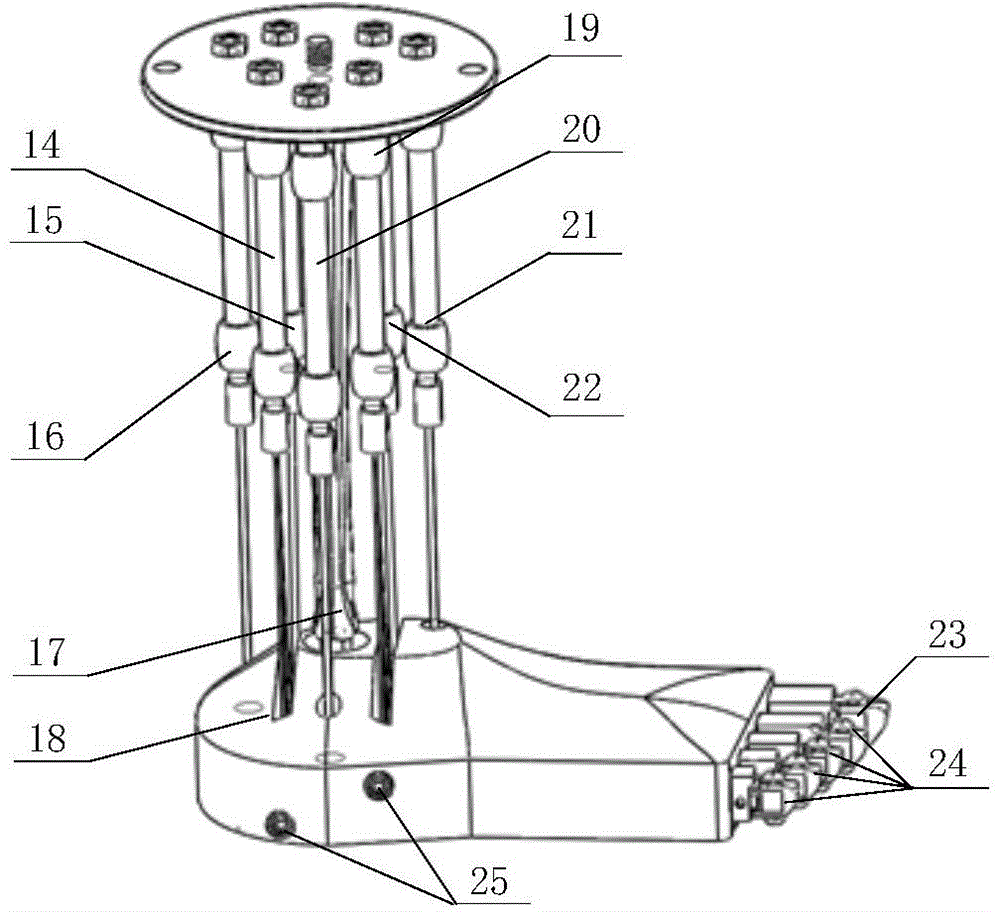
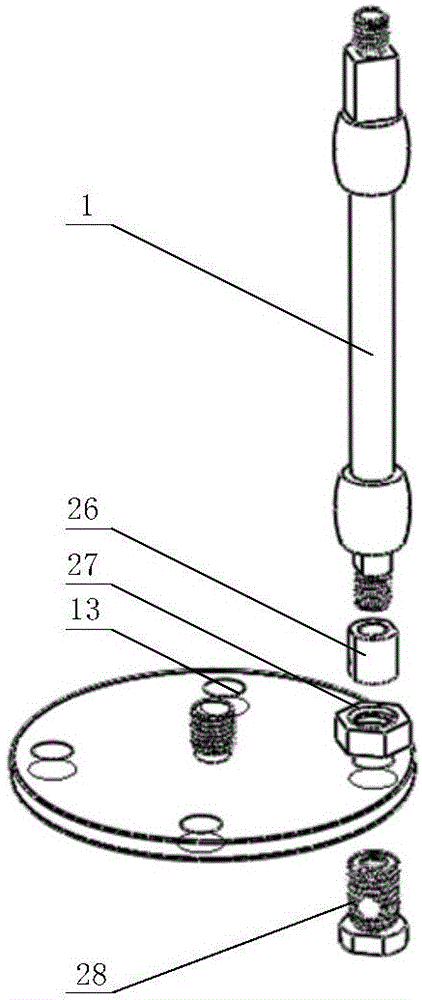
[0018] Such as figure 1 , 2 As shown, the humanoid lower limb system based on pneumatic muscles of the present invention includes: biceps femoris 1, piriformis 2, posterior thigh muscles 3, gluteus maximus 4, pelvis 5, iliopsoas 6, obturator internal muscles 7 , adductor 8, femur 9, gracilis muscle 10, rectus femoris 11, driving hip joint pneumatic muscle fixing plate 12, driving knee joint pneumatic muscle fixing plate 13, flexor toes longus 14, flexor hallucis longus 15, calf Triceps 16, fibula 17, plantar plate 18, extensor digitorum longus 19, lateral group 20, anterior group 21, extensor hallucis longus 22, big toe 23, little toe 24, driving toe guide shaft 25, aerodynamic muscles Fixed wire rope bolts at the end 26, M12 nuts 27, fixed wire rope bolts 28, air combination components 29, pressure gauges 30, pneumatic high-speed switching valves 31, pull-wire encoders 32, data acquisition cards 33, computers 34, PWM waveform generators FPGA Board card 35 , isolation and am...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More