

Alternating-current servo system speed loop controller parameter self-tuning method
A technology of parameter self-tuning and system speed, applied in the field of servo motor system, which can solve the problems of complex identification algorithm structure, not considering the influence of the limiting performance of the control variable, and the control volume being too large.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
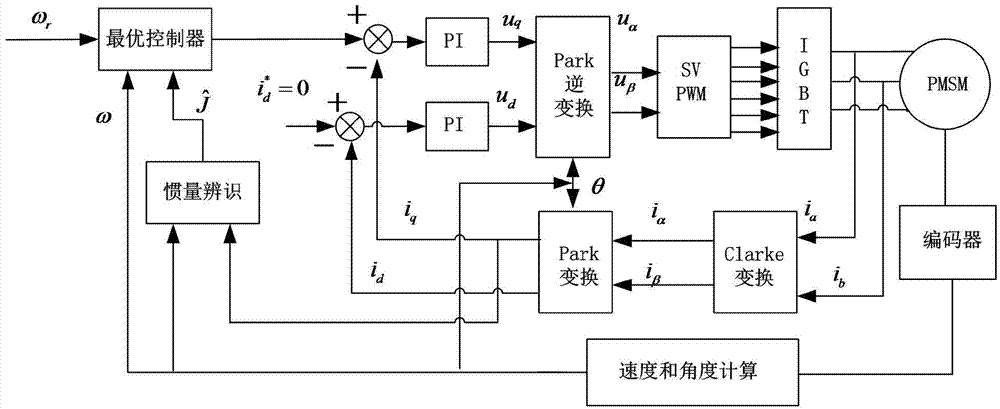
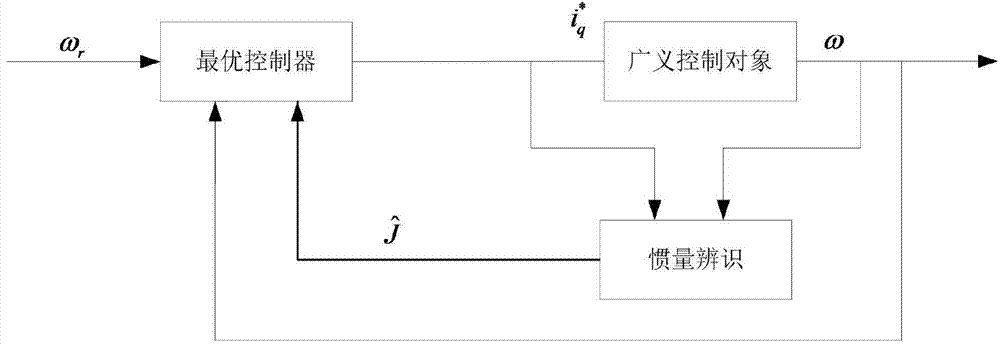
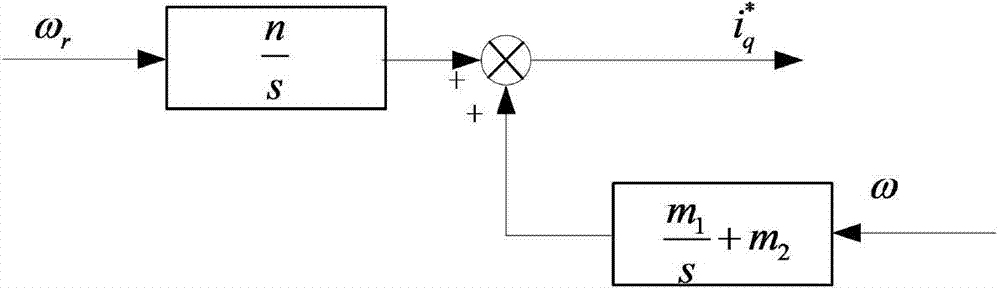
[0040] Embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings.
[0041] According to the mathematical model of the AC servo system:
[0042] i · d i · q ω · = - R L n p ω 0 n p ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More