

Six-leg walking robot in parallel connection driven by rotation
A walking robot, rotation drive technology, applied in the direction of motor vehicles, transportation and packaging, etc., can solve the problems of cumbersome layout, complex structure of walking robot, easy interference, etc., and achieve the effect of reducing moment of inertia, walking stability, and reducing self-weight
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
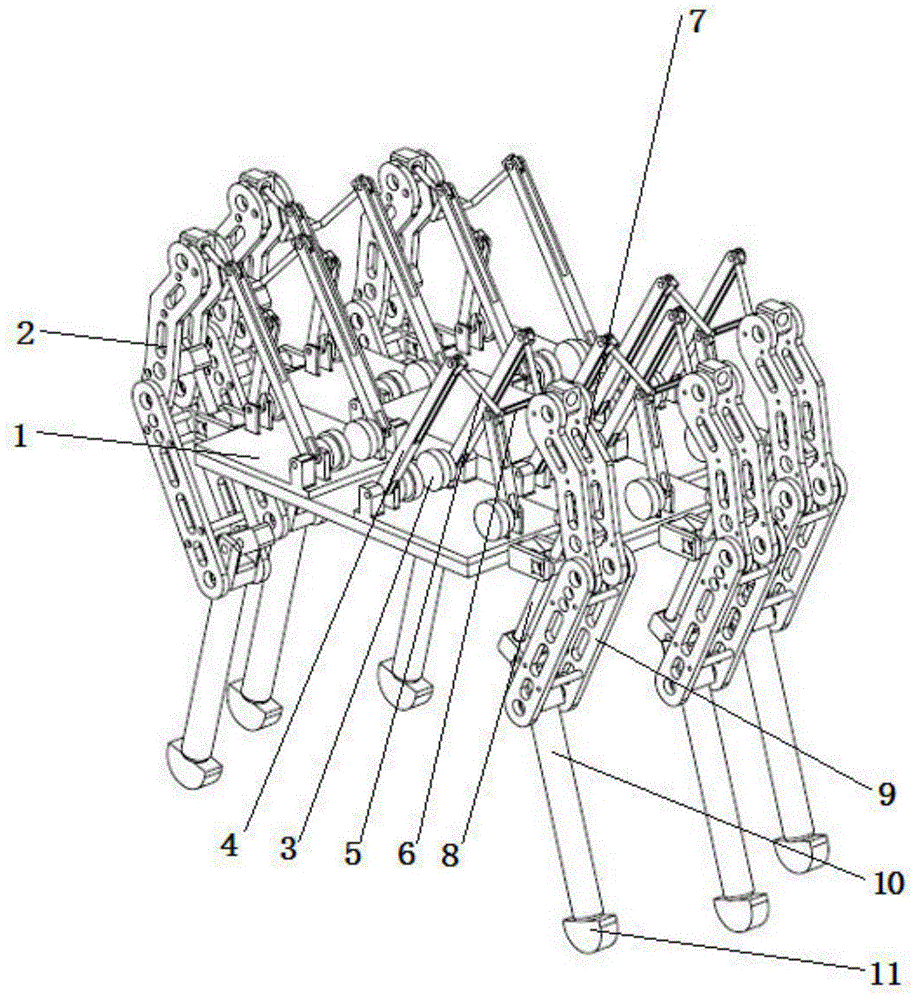
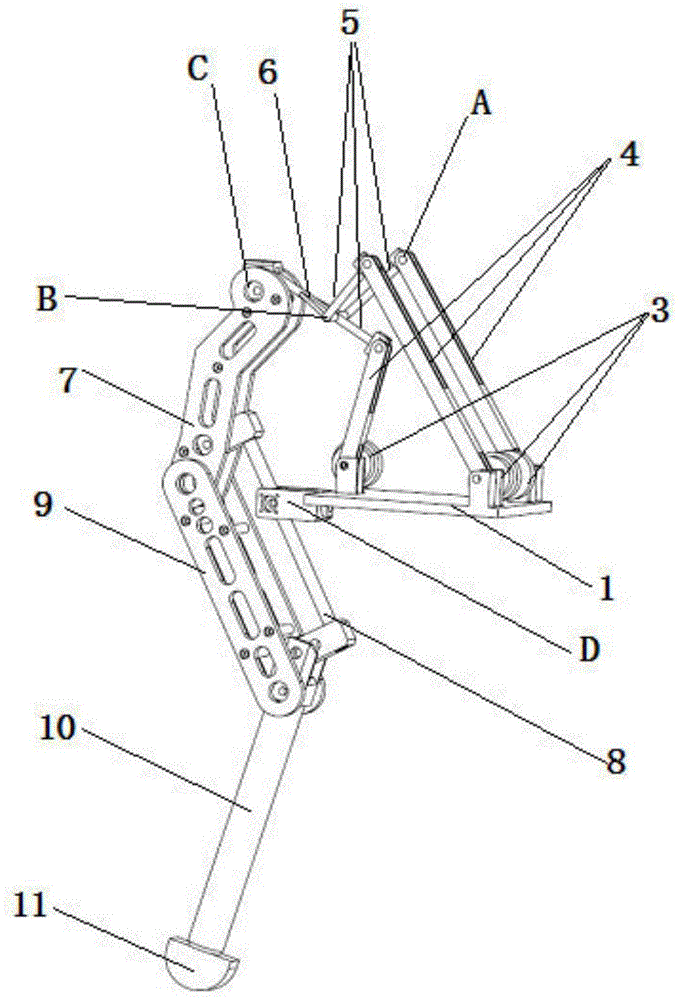
[0026] This embodiment provides a rotationally driven parallel hexapod walking robot, which includes a frame and six parallel driving legs. The parallel driving legs are installed on the frame and include a parallel driving mechanism and a leg mechanism. The parallel driving mechanism is a three branch chain structure, including a driving motor, three rockers, three connecting rods and a moving platform. The three drive motors are fixed on the frame, respectively directly drive the three rockers, and control the three-dimensional movement of the braking platform through the three connecting rods, and the moving platform drives the leg mechanism to move in space; the leg mechanism is a four-bar structure, including the drive rod, Link rods, leg links and lower leg members. The middle of the connecting frame rod is hinged on the frame, and the two ends are respectively hinged to the driving rod and the lower leg rod. The drive rod and lower leg member are connected at the othe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More