

Adjustable four-foot bionic-robot motion structure
A robot movement and four-legged technology, applied in the field of robotics, can solve the problems of a single type of bionic movement, the inability to adjust the distance between the front and rear legs, and the inability of the bionic robot to control system matching, etc., and achieve the effect of simple structure and strong adjustability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] Below in conjunction with accompanying drawing, the present invention will be further described:
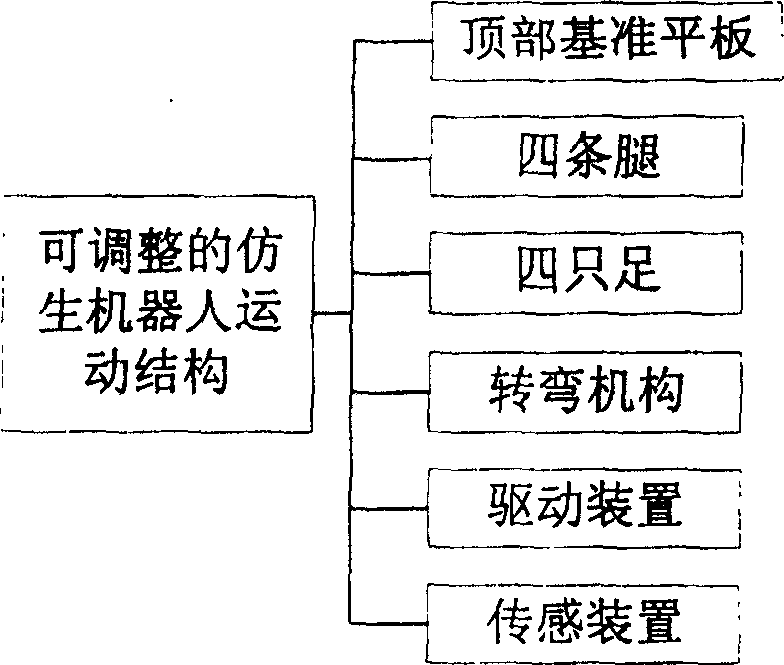
[0023] figure 1 It is a block diagram of the motion structure of the adjustable quadruped bionic robot realized by the present invention. The whole motion structure mainly includes a top reference plate, four symmetrical legs, four feet, four turning mechanisms, a driving device and a sensing device. Each of said legs includes three rotating joints of thigh, calf, hip joint, knee joint and ankle joint; there is a turning joint between the top reference plate and the thigh; wherein each driving device includes a servo motor and a gear reducer; The sensing device includes: 12 encoders, 2 inclination sensors, 8 potentiometers, 8 limit switches, and 4 contact switches.
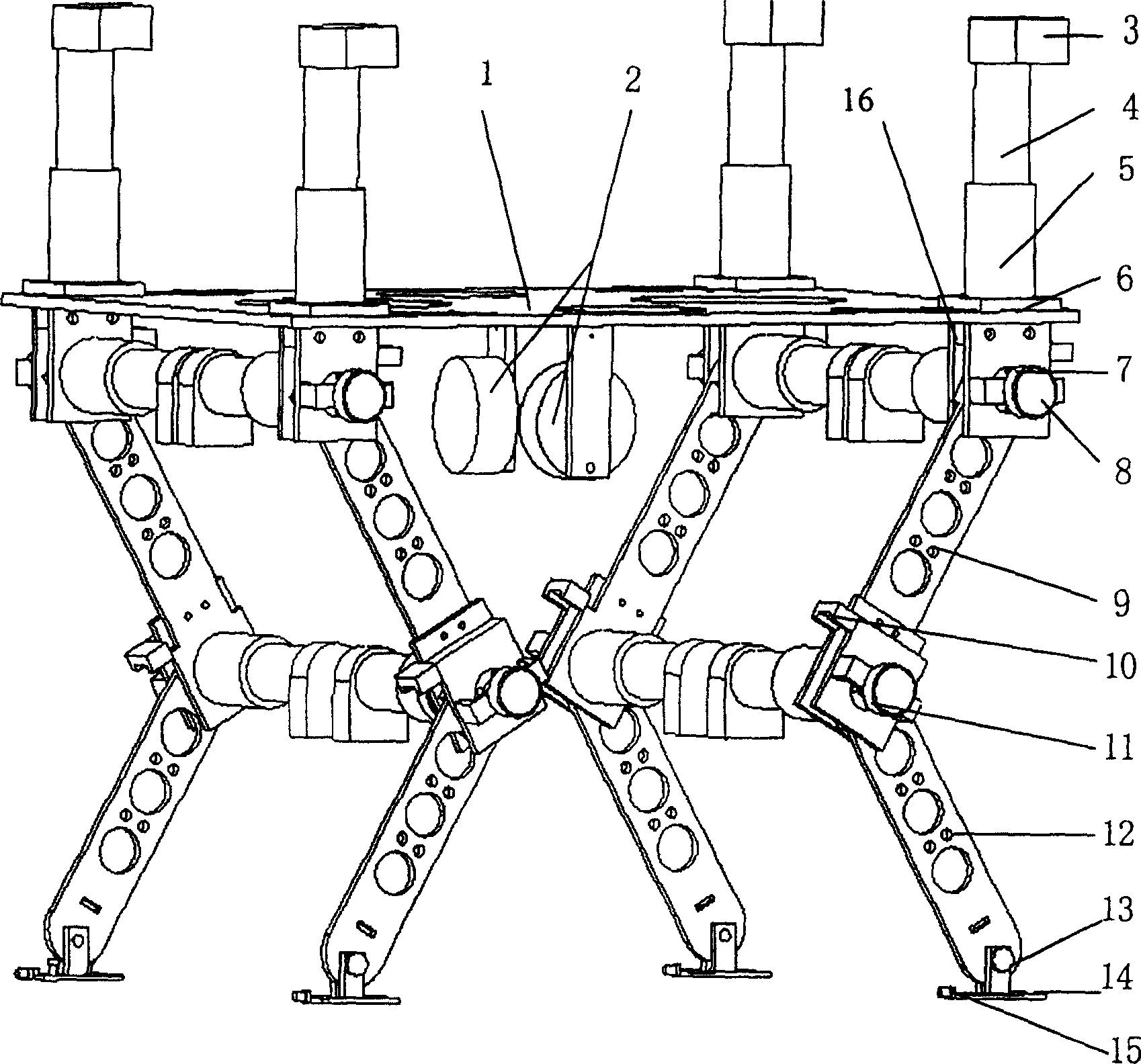
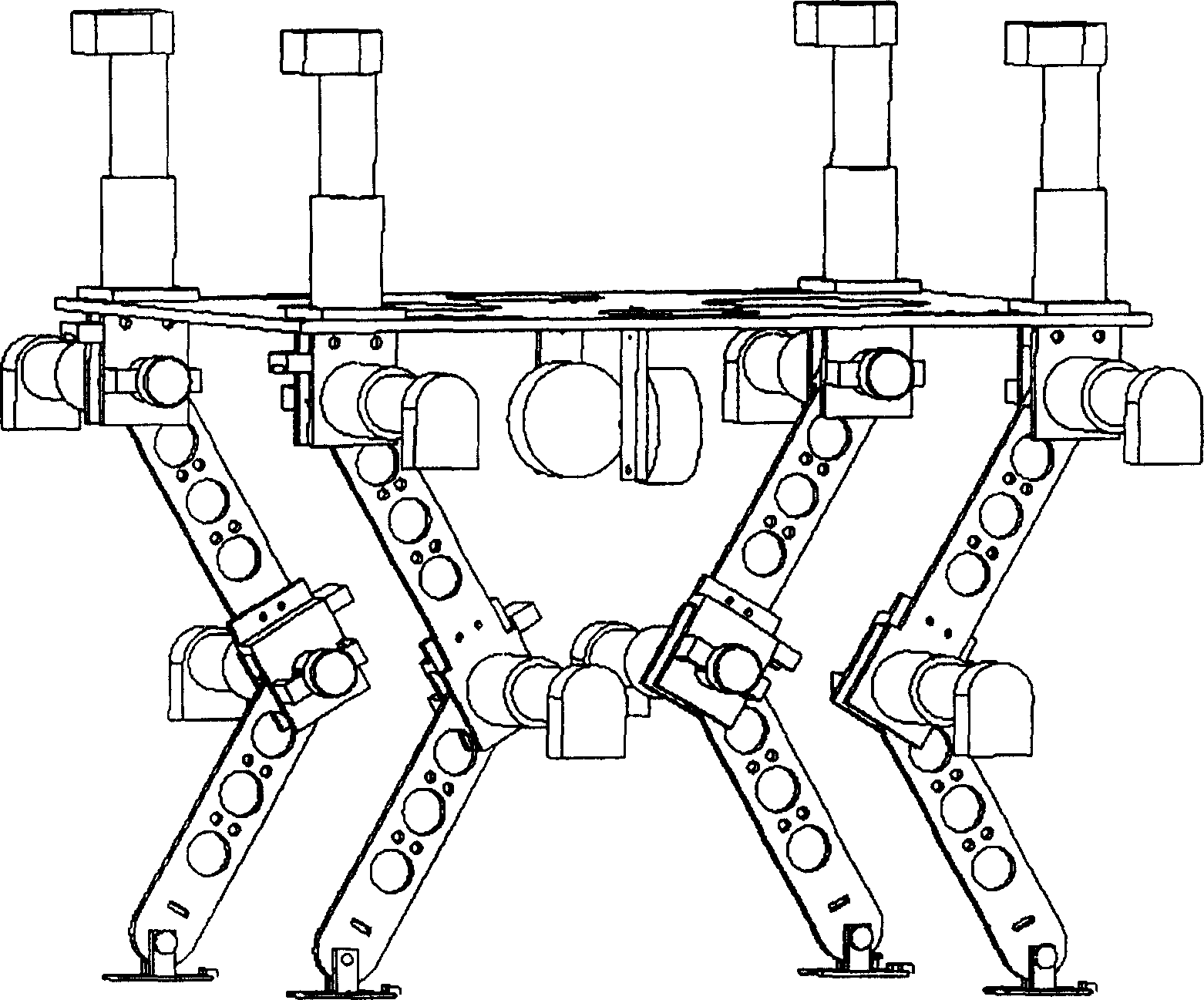
[0024] figure 2 It is a schematic diagram of the adjustable quadruped bionic robot motion structure realized by the present invention, which mainly includes a top reference plate 1, an adjustment slot 6, a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More