

Fruit tree picking robot
A technology for picking robots and fruit trees, which is applied in the directions of picking machines, harvesters, agricultural machinery and implements, and can solve problems such as the inability to meet the cutting of fruit vines of different thicknesses.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The technical solutions of the various embodiments of the present invention will be clearly and completely described below in conjunction with the accompanying drawings. Apparently, the described embodiments are only some of the embodiments of the present invention, not all of them. Based on the embodiments described in the present invention, all other embodiments obtained by persons of ordinary skill in the art without creative efforts are within the protection scope of the present invention.
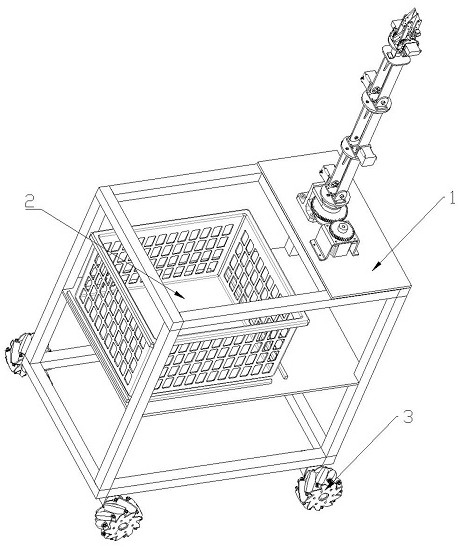
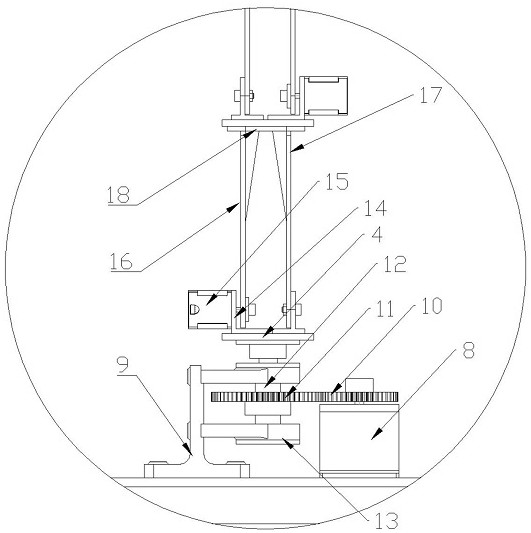
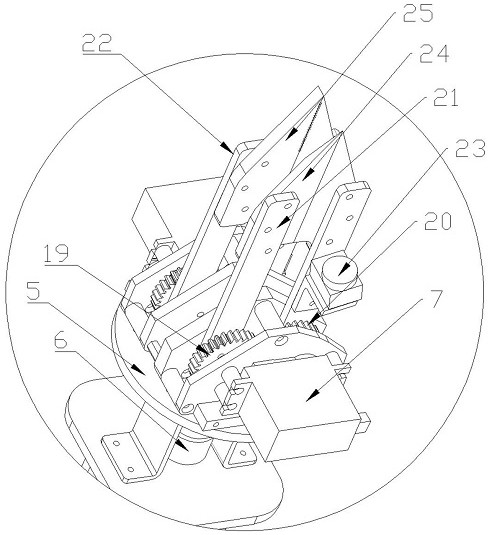
[0039] Embodiment 1 of the present invention provides a kind of fruit tree picking robot, such as Figure 1-10 As shown, it includes a frame 1, the frame 1 is provided with an open collection frame 2, the bottom end of the frame 1 is provided with several mecanum wheels 3, and the frame 1 is equipped with The picking arm joint structure is equipped with a picking device at the end of the picking arm joint structure; the picking arm joint structure includes a waist joint structur...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More