

A Design Method of UAV Directional Antenna Self-tracking System
A directional antenna and system design technology, applied in the direction of control using feedback, can solve the problems of tracking system motion fluctuations, increasing the complexity of the control system, and large fluctuations in tracking angle changes, so as to improve system reliability and adaptability, Improve maneuverability and concealment, reduce the effect of overhead tracking error
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The present invention is to provide a design method of a UAV directional antenna self-tracking system. The present invention will be described in detail below in conjunction with the accompanying drawings.
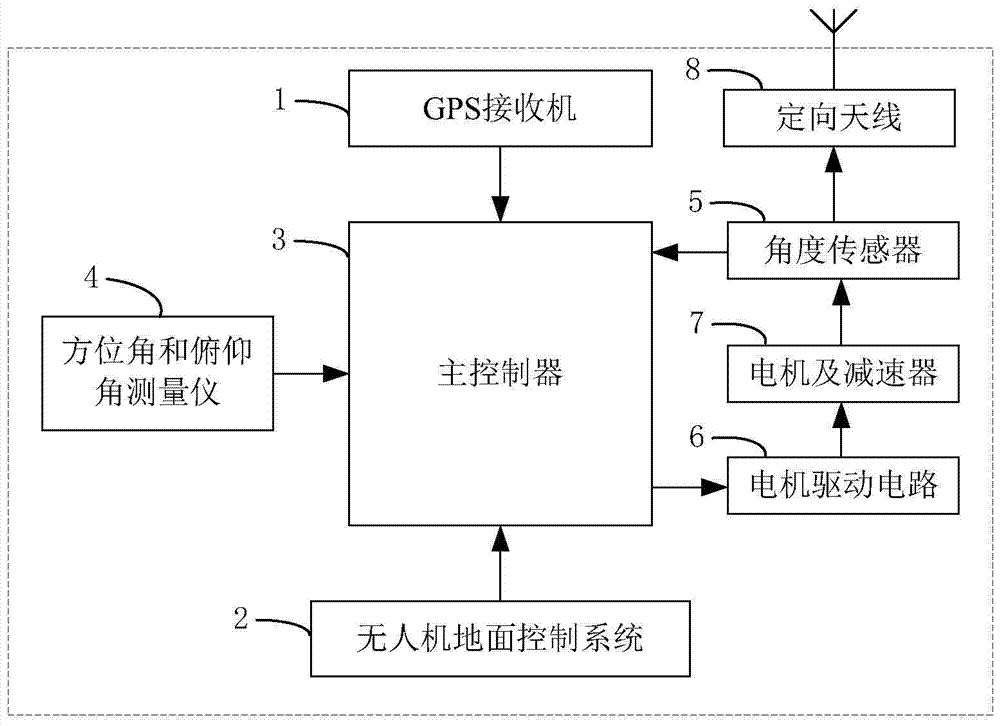
[0031] Such as figure 1 As shown, the directional antenna automatic tracking system applied in the present invention mainly includes: GPS receiver 1, unmanned aerial vehicle ground control system 2, master controller 3, azimuth and pitch angle measuring instrument 4, angle sensor 5, Motor drive circuit 6, motor and reducer 7 and directional antenna 8.
[0032]Install the GPS receiver 1 on the vehicle to obtain the position and speed of the directional antenna in real time, and send it to the main controller 3 . Utilize the UAV ground control system 2 to receive the position and speed of the UAV transmitted by the UAV in real time through the data link, and then forward it to the main controller 3 . The function that main controller 3 realizes is: Utilize the posit...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More