

Unmanned aerial vehicle directional antenna self-tracking system design method
A directional antenna and system design technology, applied in the direction of control using feedback, can solve problems such as increased system wear, loss of tracking targets, and large tracking errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The present invention is to provide a design method of a UAV directional antenna self-tracking system. The present invention will be described in detail below in conjunction with the accompanying drawings.
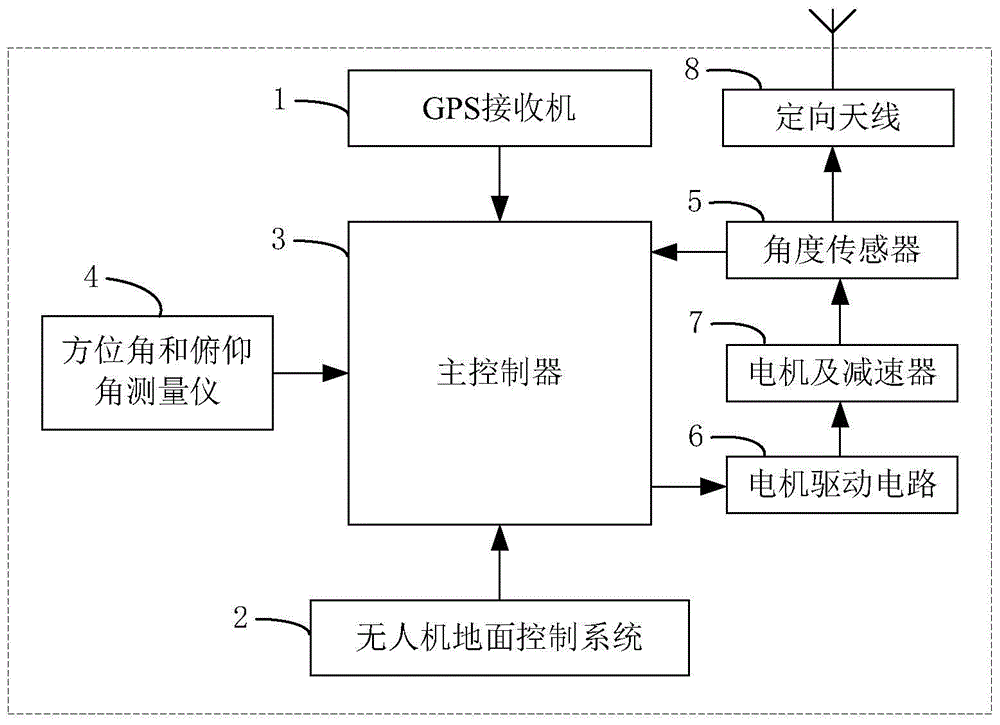
[0031] Such as figure 1 As shown, the directional antenna automatic tracking system applied in the present invention mainly includes: GPS receiver 1, unmanned aerial vehicle ground control system 2, master controller 3, azimuth and pitch angle measuring instrument 4, angle sensor 5, Motor drive circuit 6, motor and reducer 7 and directional antenna 8.
[0032]Install the GPS receiver 1 on the vehicle to obtain the position and speed of the directional antenna in real time, and send it to the main controller 3 . Utilize the UAV ground control system 2 to receive the position and speed of the UAV transmitted by the UAV in real time through the data link, and then forward it to the main controller 3 . The function that main controller 3 realizes is: Utilize the posit...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More