

A Triangle Intersection Detection Method Applied to Teleoperation 3D Visual Simulation
A technology of 3D vision and intersection detection, applied in image data processing, 3D modeling, instruments, etc., can solve the problem of time-consuming collision detection, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] The present invention will be described in further detail below in conjunction with the accompanying drawings.
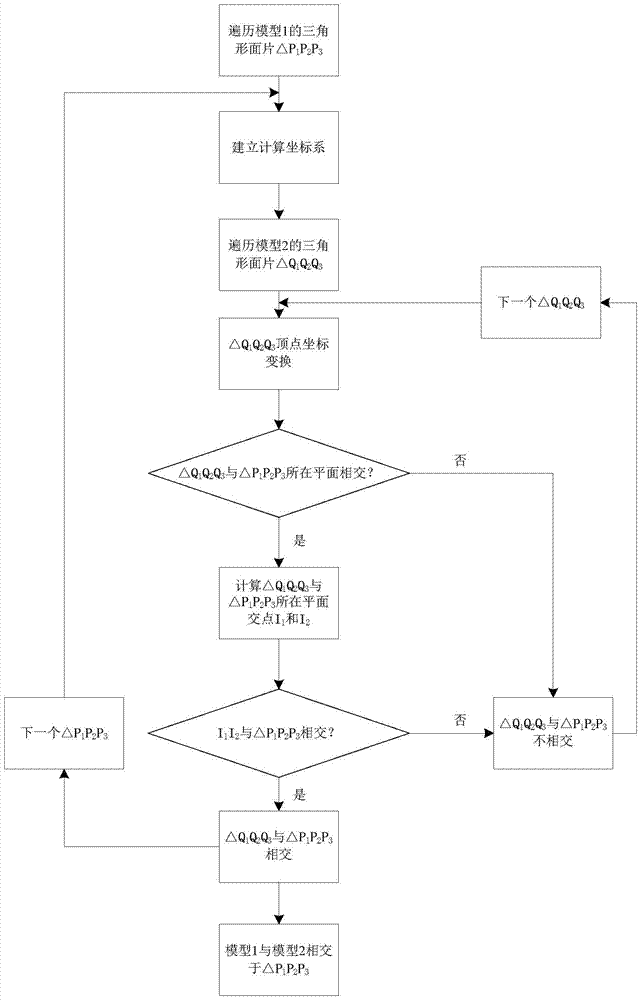
[0043] see figure 1 and figure 2 , this embodiment describes that in a scene of teleoperation with a manipulator, the triangle intersection detection algorithm of the present invention is used to traverse the triangle patch of the hand claw model and perform the following steps.
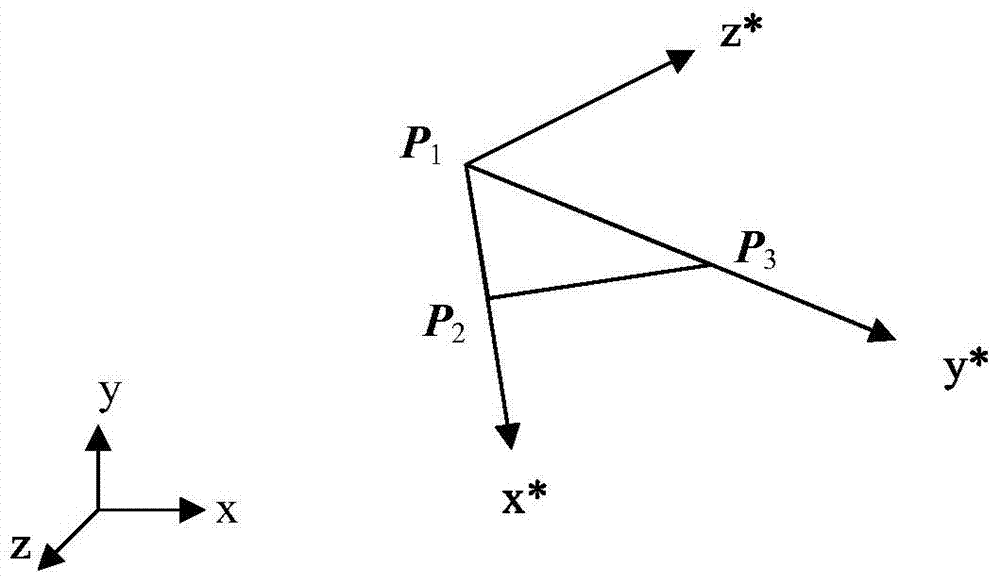
[0044] Step 1: Establish calculation coordinate system
[0045] Denote the triangle facet as ΔP 1 P 2 P 3 , vertex P 1 ,P 2 ,P 3 in counterclockwise order. make p 1 =P 2 -P 1 ,p 2 =P 3 -P 1 , get [p 1 p 2 p 1 ×p 2 ] -1 .
[0046] To traverse the triangular patches of the target model, perform the following steps.
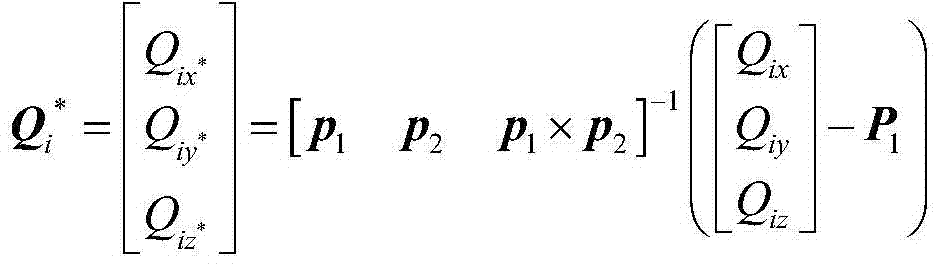
[0047] Step 2: Vertex coordinate transformation
[0048] Denote the triangular facet as ΔQ 1 Q 2 Q 3 , vertex Q 1 , Q 2 , Q 3 in counterclockwise order.
[0049] calculate Where 1≤i≤3 represents three vertices.
[0050] Step 3: Judging Δ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More