

Four-rotor aircraft attitude and position hybrid control method based on DIC-PID
A quadrotor aircraft, hybrid control technology, applied in attitude control, three-dimensional position/channel control, vehicle position/route/altitude control and other directions, can solve problems such as poor control effect, achieve excellent stability, good control effect, Robust effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0068] The technical solutions in the embodiments of the present invention will be clearly and completely described and discussed below in conjunction with the accompanying drawings of the present invention. Obviously, what is described here is only a part of the examples of the present invention, not all examples. Based on the present invention All other embodiments obtained by persons of ordinary skill in the art without creative efforts fall within the protection scope of the present invention.
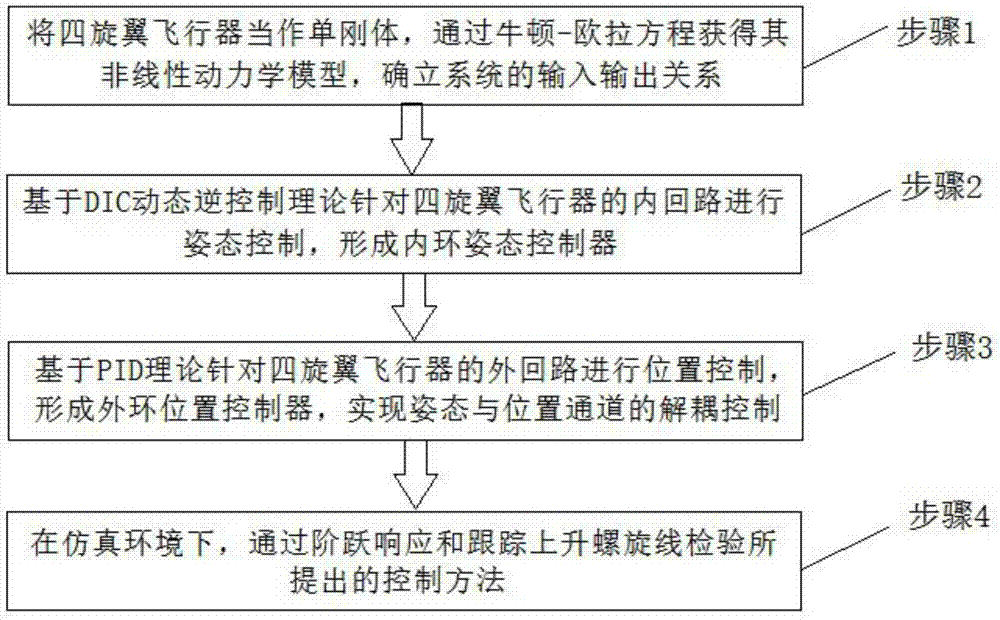
[0069] Such as figure 1 As shown, the present invention discloses a hybrid control method of attitude and position of a DIC-PID-based quadrotor aircraft, comprising the following steps:
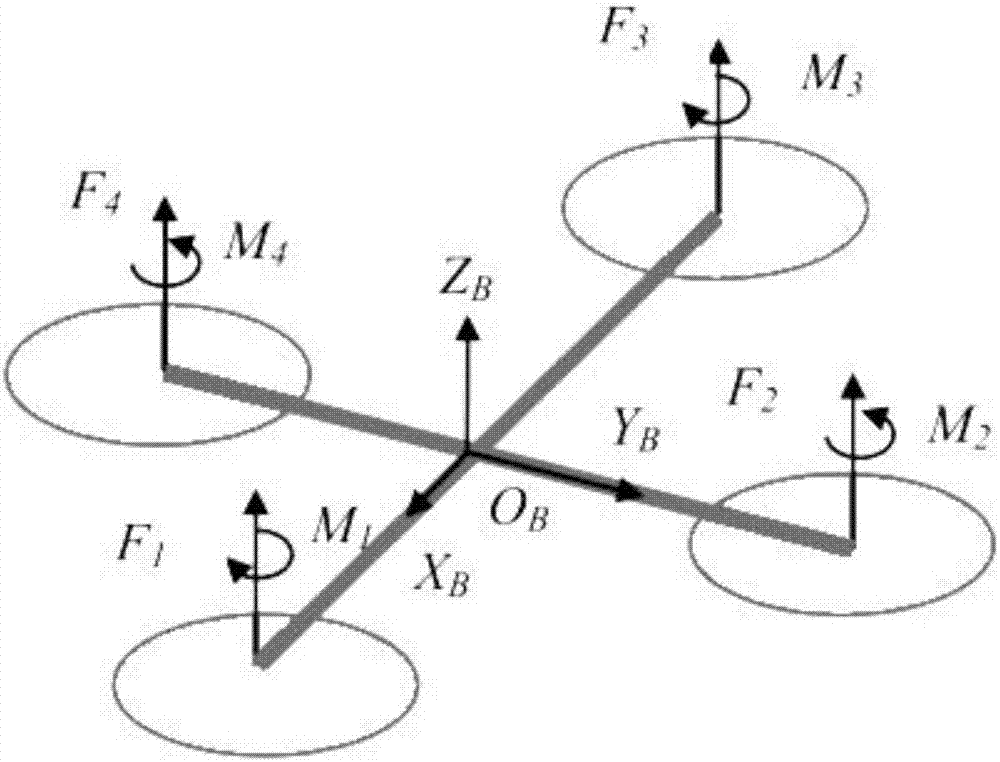
[0070] Step 1: Treat the quadrotor aircraft as a single rigid body, obtain its nonlinear dynamic model through the Newton-Euler equation, and establish the input-output relationship of the system;
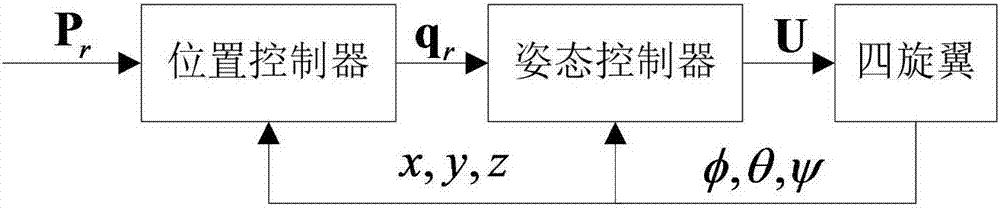
[0071] Step 2: Based on the DIC dynamic inverse control theory, perform attitude control on the in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More