

Sliding form control method of flexible joint mechanical arm based on disturbance observer
A technology of interference observer and flexible joint, applied in adaptive control, general control system, control/regulation system, etc., can solve problems such as increasing the gain of sliding mode controller
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0105] The present invention will be further described in detail below in conjunction with the accompanying drawings and technical solutions.
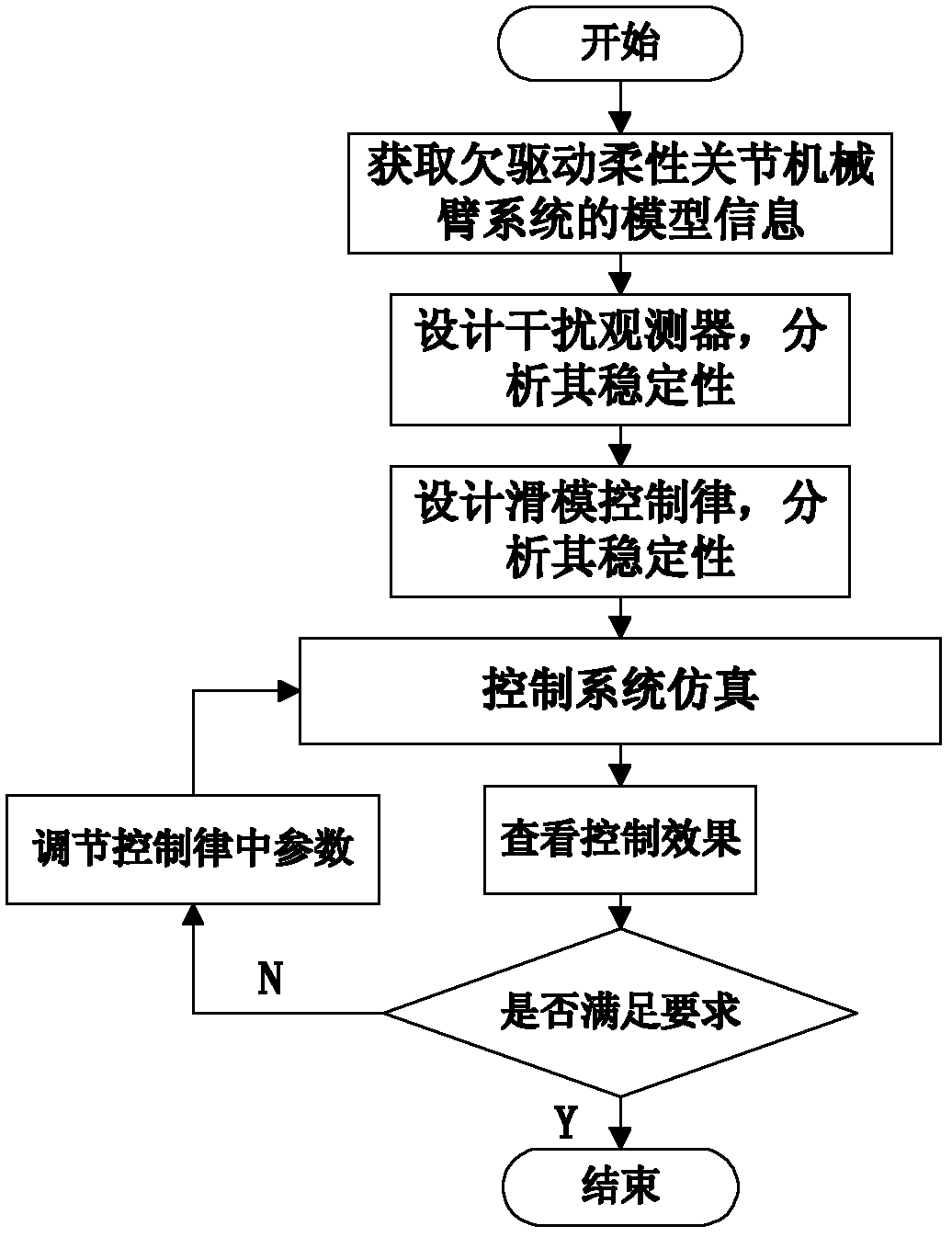
[0106] See figure 1 , the present invention is based on the sliding mode control method of the flexible joint manipulator of the disturbance observer, and the specific steps of the method are as follows:
[0107] Step 1: Analysis and construction of the underactuated flexible joint manipulator system model
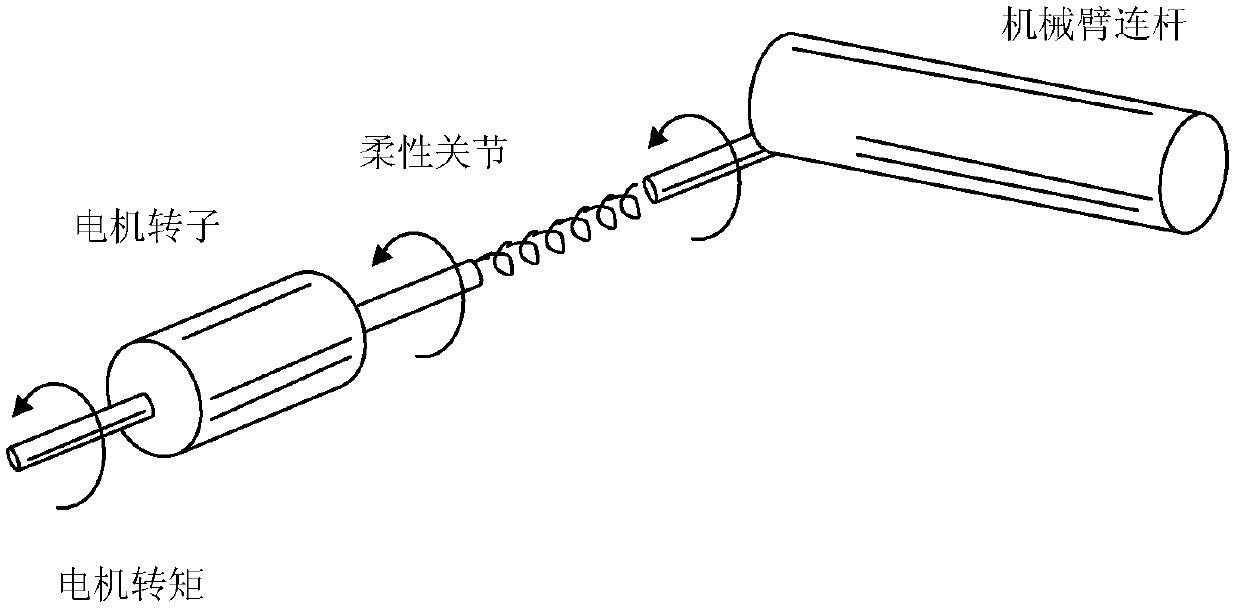
[0108] The system targeted by the present invention is an underactuated flexible articulated manipulator system. According to the dynamic equation, the underactuated flexible joint manipulator system is analyzed, and its mathematical model can be obtained as follows:
[0109] I q · · + K ( q - q m ) + Mgl ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More