

Manipulator system for coordinated control of at least two manipulators
A technology of manipulators and controllers, applied in the field of manipulator systems, can solve problems such as high costs, achieve the effects of reducing coordination costs, strengthening protection, and reducing system computing capabilities
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
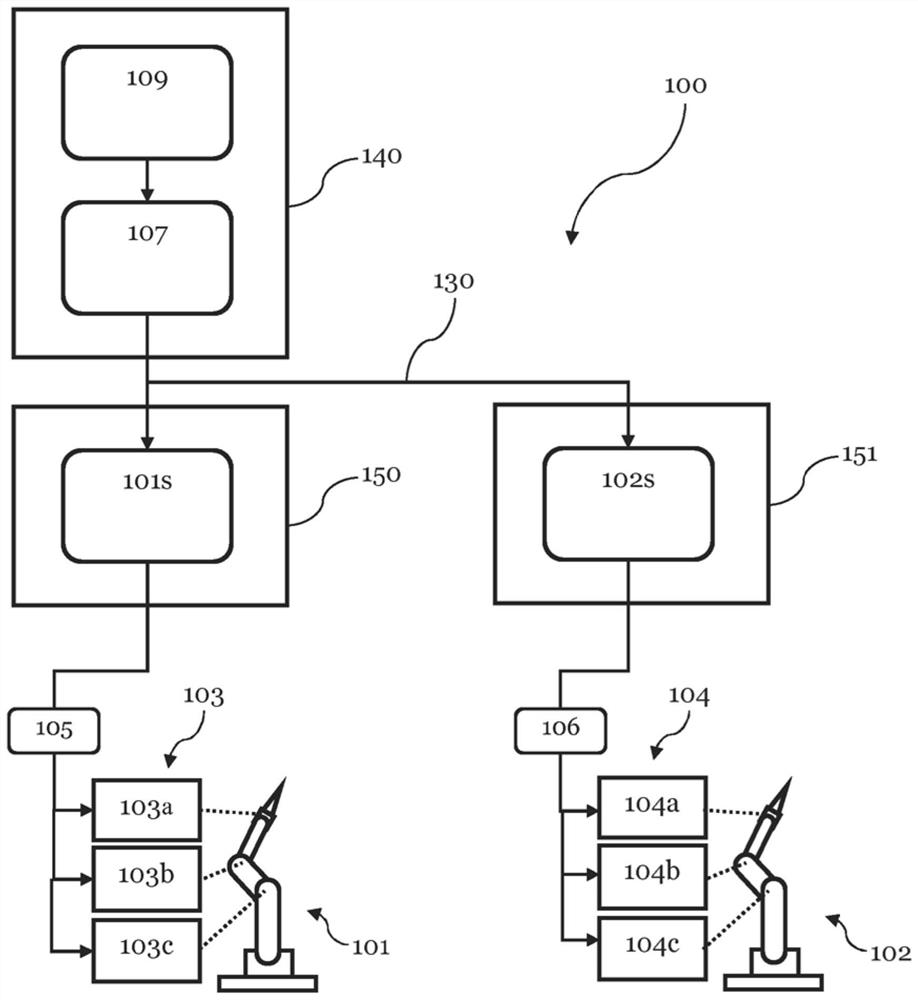
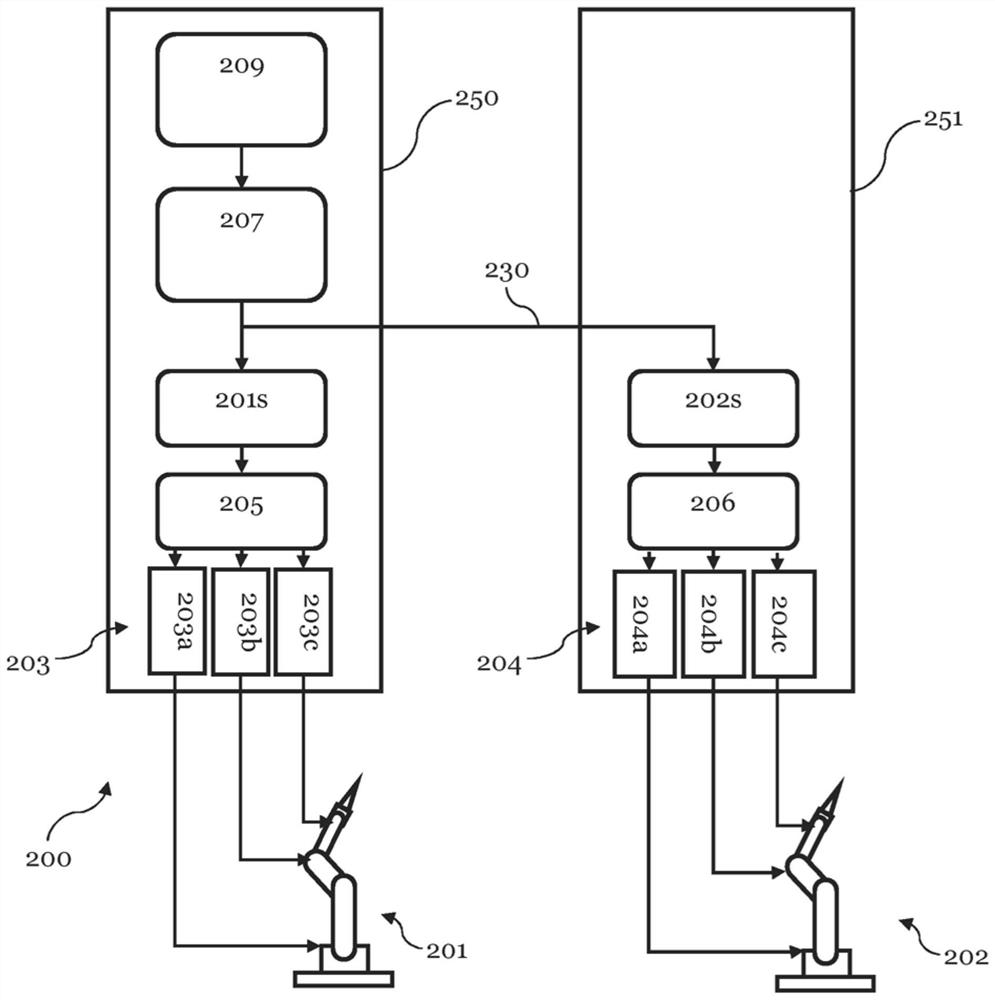
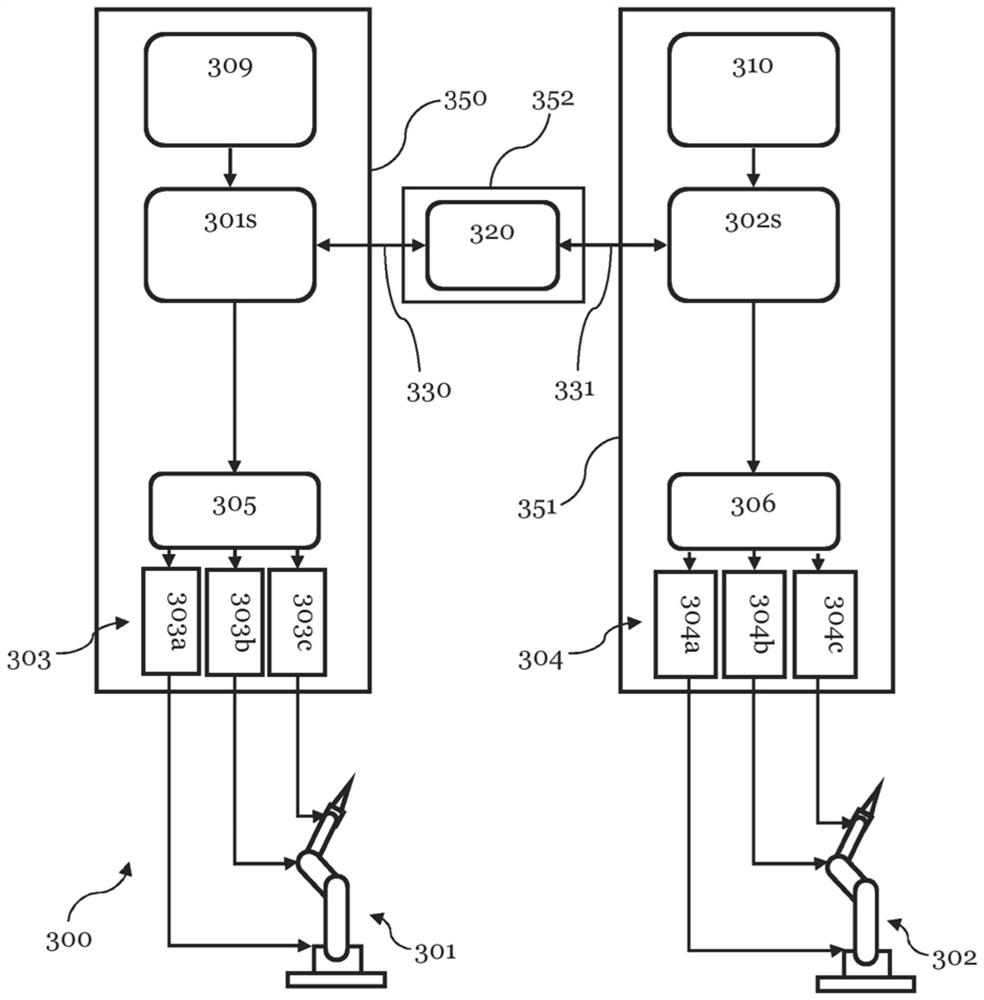
[0056] exist Figure 1 to Figure 3 In particular, system components, which are preferably implemented in software, are represented as rounded rectangles. System components, preferably implemented in hardware, are represented as pointed rectangles.
[0057] figure 1 A manipulator system 100 is shown, the construction of which substantially corresponds to the manipulator system claimed in the present invention. The manipulator system 100 is used for coordinated control of at least two manipulators 101 , 102 . The manipulators 101 , 102 shown are multi-axis manipulators having at least three axes. In general, such multi-axis manipulators 101 , 102 have at least six axes. But due to figure 1 It is schematic and therefore not all axes of the manipulators 101, 102 are shown.
[0058] Each axis of the manipulators 101, 102 is equipped with an actuator (not shown) which can be steered by means of a converter 103a, 103b, 103c, 104a, 104b, 104c. The number of converters used is...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More