

Fish tail-simulated two-degree-of-freedom swinging flexible parallel mechanism
A degree of freedom and flexible technology, applied in the field of robotics, can solve problems such as insufficient smooth motion and complex mechanism, and achieve the effect of reducing complexity and enhancing flexibility and compliance.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
[0022] The present invention is a bionic fish tail swing driving device based on a flexible mechanism. The following will introduce in detail the structural diagrams of the bionic fish tail swinging in different directions.
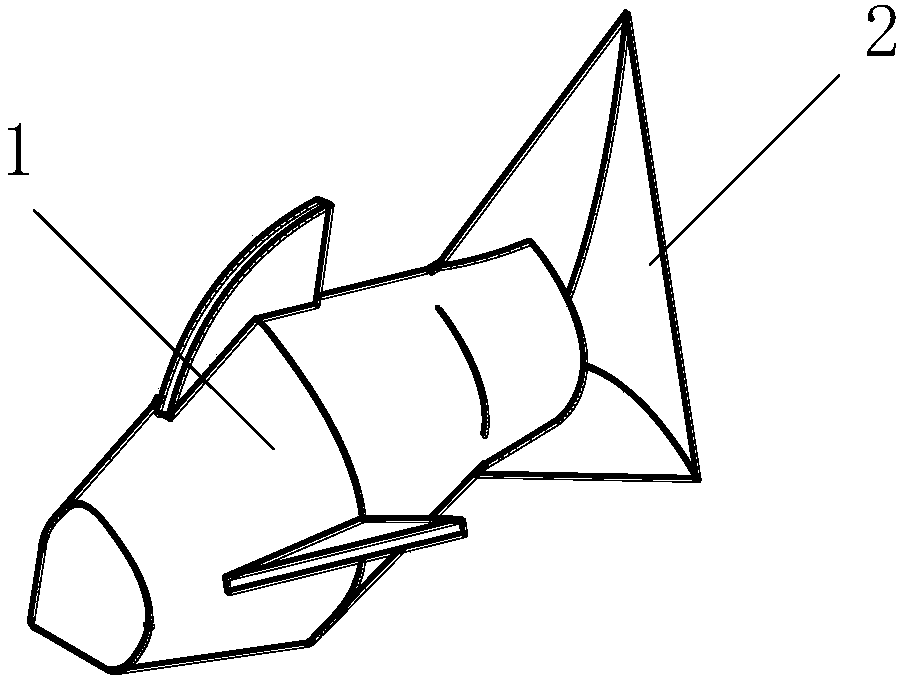
[0023] Such as figure 1 As shown, the bionic fish is composed of a trunk part 1 and a tail part 2, and the trunk part 1 and the tail part 2 are fixedly connected by skin.
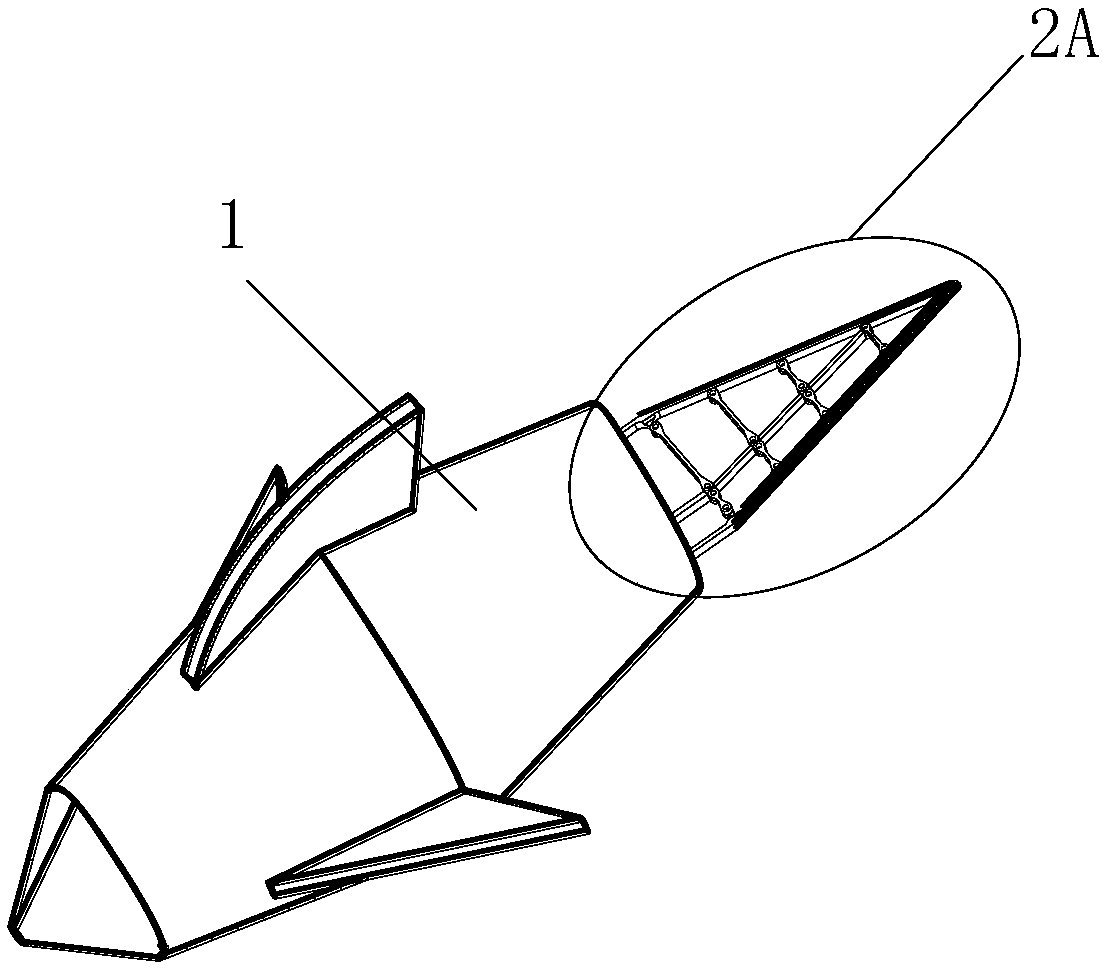
[0024] Such as figure 2 As shown, the tail part 2 of the bionic fish is composed of a tail skeleton structure 2A and a tail skin 2B, and the key part of the tail swing is the tail skeleton structure 2A.
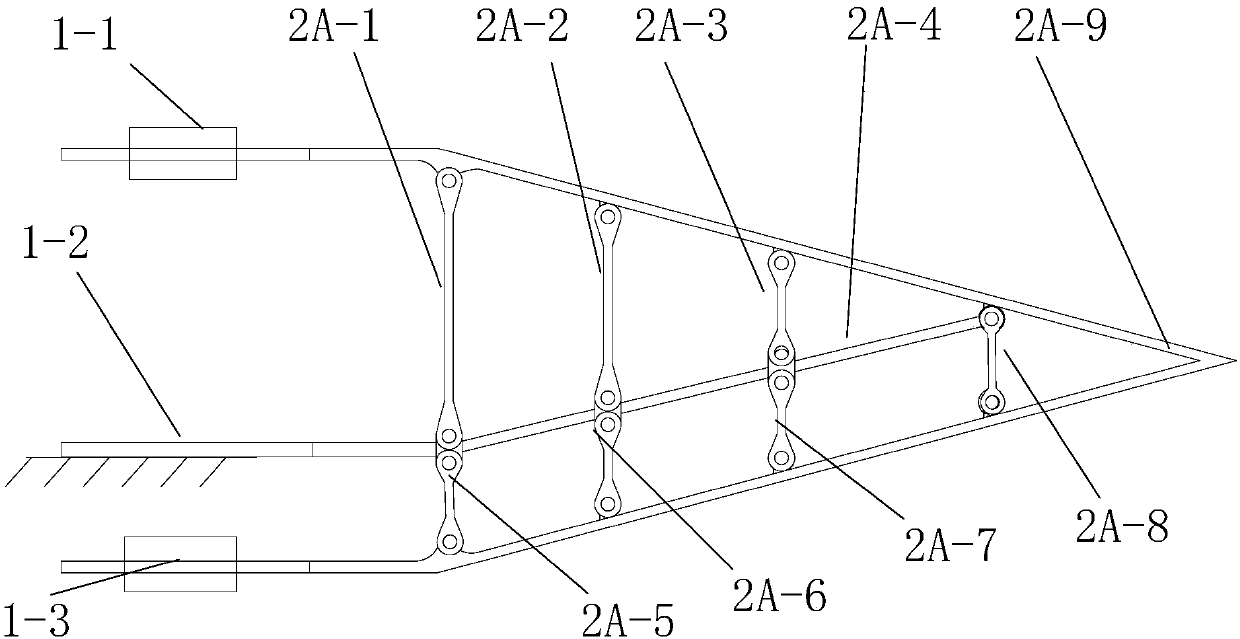
[0025] Such as image 3 As shown, the tail skeleton structure 2A of the bionic fish is composed of several flexible connecting rods, hinges, driving devices and fixing devices. The overall tail driving device 1-1 and the tail end driving device 1...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More