

A Prevention Strategy for Severe Degradation of Kinematic Performance of Space Manipulator
A space manipulator, motion performance technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as inability to meet the requirements of on-orbit operation tasks, inability to characterize the comprehensive motion performance of space manipulators, and inability to solve coupling problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
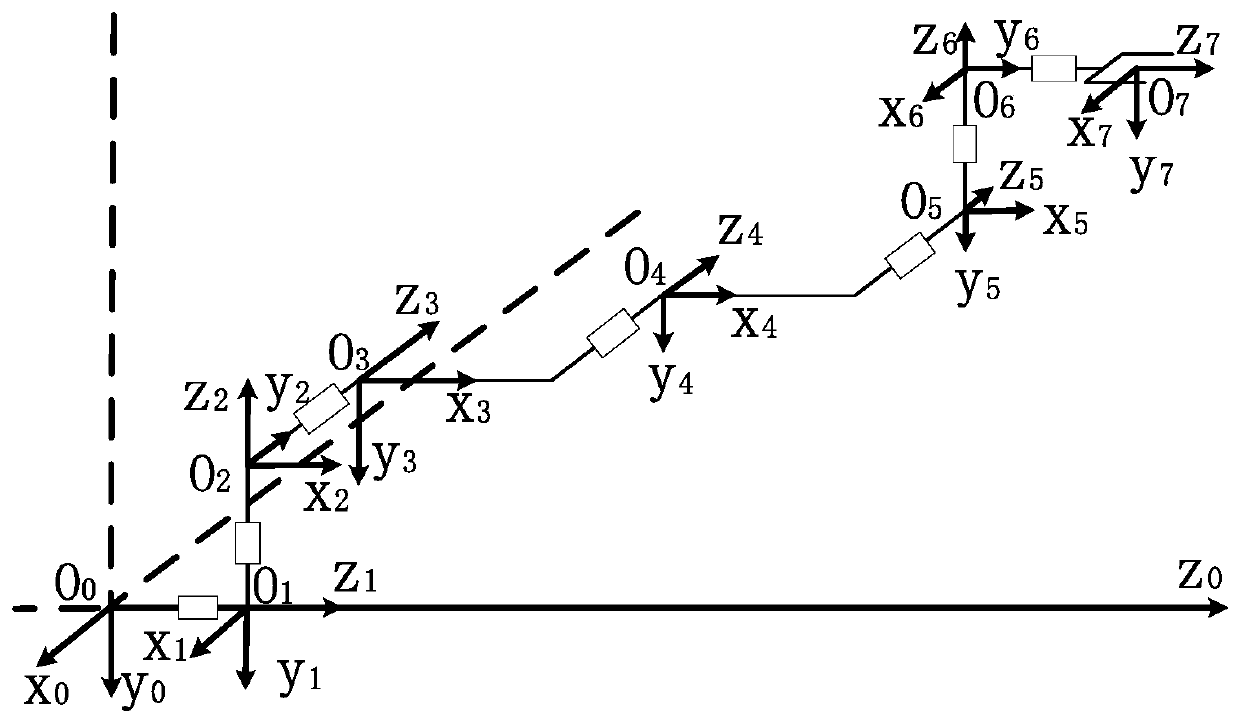
[0083] 1. to figure 2 The seven-degree-of-freedom space manipulator shown is the research object, and its corresponding D-H parameters are shown in Table 3.
[0084] Table 3 D-H parameters corresponding to the initial configuration of the seven-degree-of-freedom space manipulator
[0085]
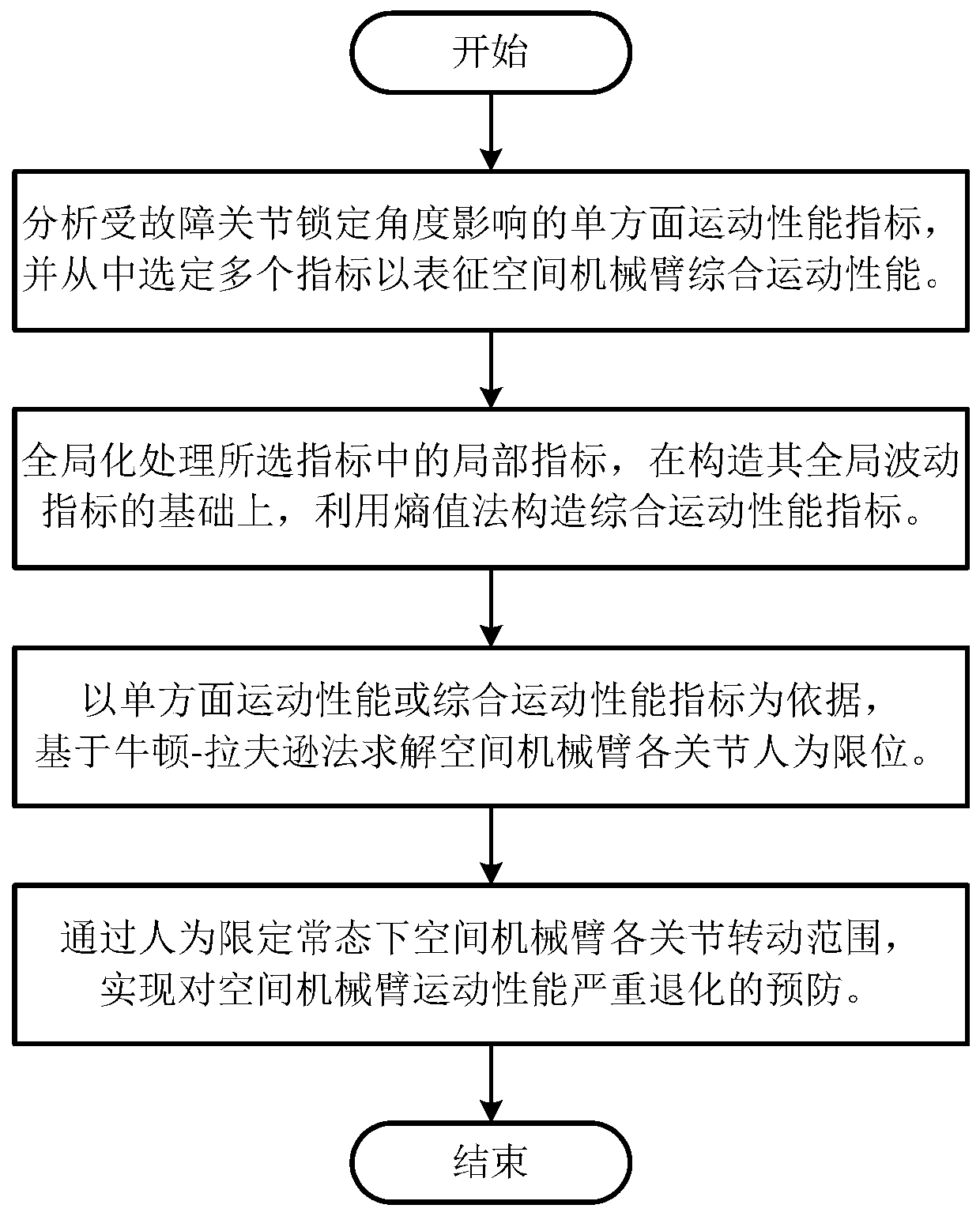
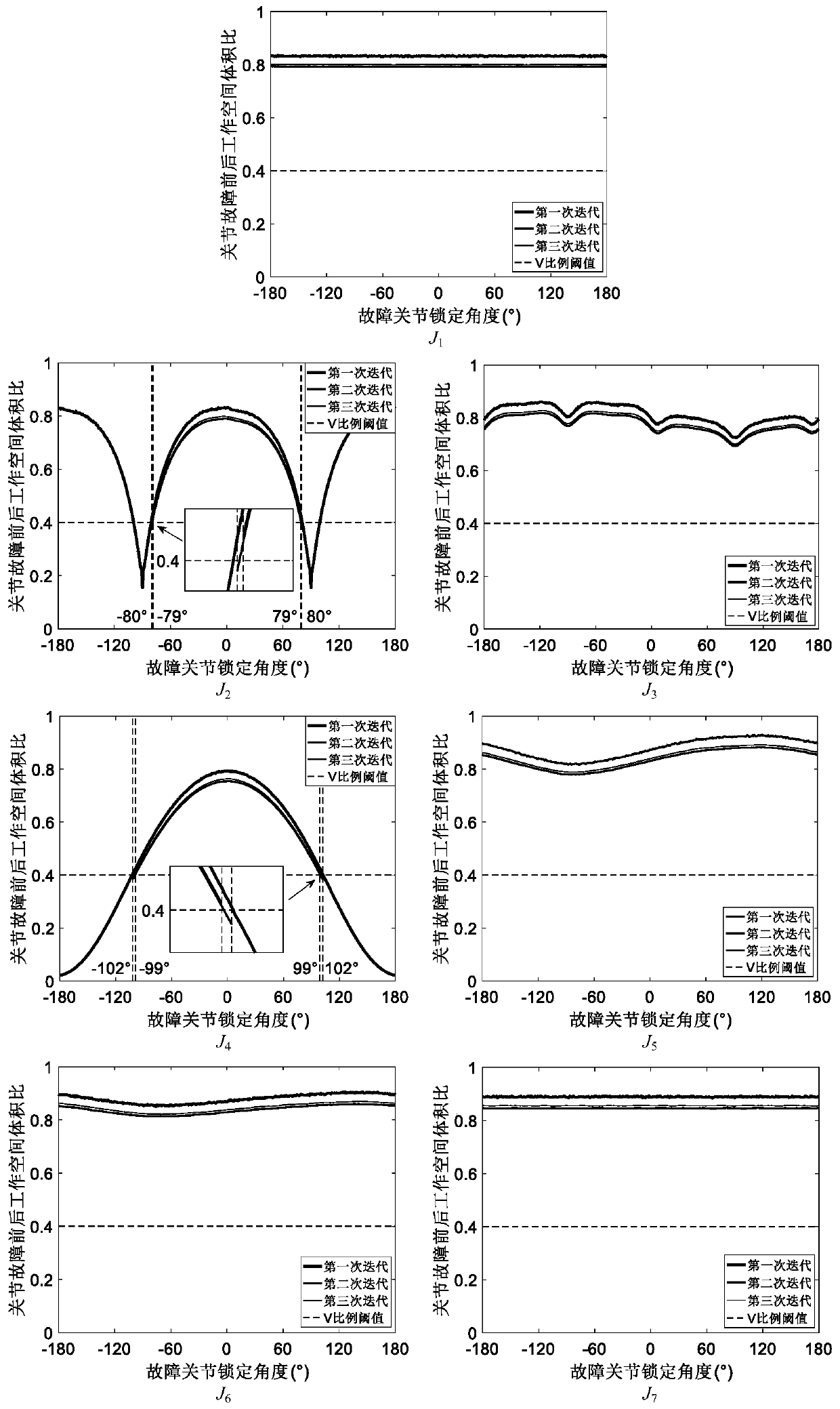
[0086] 2. Solve the artificial limit of each joint of the space manipulator based on the Newton-Raphson method
[0087] Let the degenerate workspace volume of the seven-degree-of-freedom space manipulator be Under normal conditions (when the joints are artificially limited), the working space volume is by index ratio In order to complete the solution criterion, the allowable error υ = 1° for the upper and lower limits of the artificial limit of each joint obtained by two adjacent iterations is determined comprehensively considering the actual calculation amount and the joint artificial limit accuracy requirements.
[0088] Set the initial artificial limit of each joint as the cor...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More