

High-precision control device and method used for industrial robot
A technology of industrial robots and control methods, applied in the direction of program-controlled manipulators, manipulators, manufacturing tools, etc., can solve problems such as large friction range, difficulty in satisfying model control, and limited convergence accuracy of dynamic parameters.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] Embodiments of the present invention are described in detail below, examples of which are shown in the drawings, wherein the same or similar reference numerals designate the same or similar elements or elements having the same or similar functions throughout. The embodiments described below by referring to the figures are exemplary and are intended to explain the present invention and should not be construed as limiting the present invention.
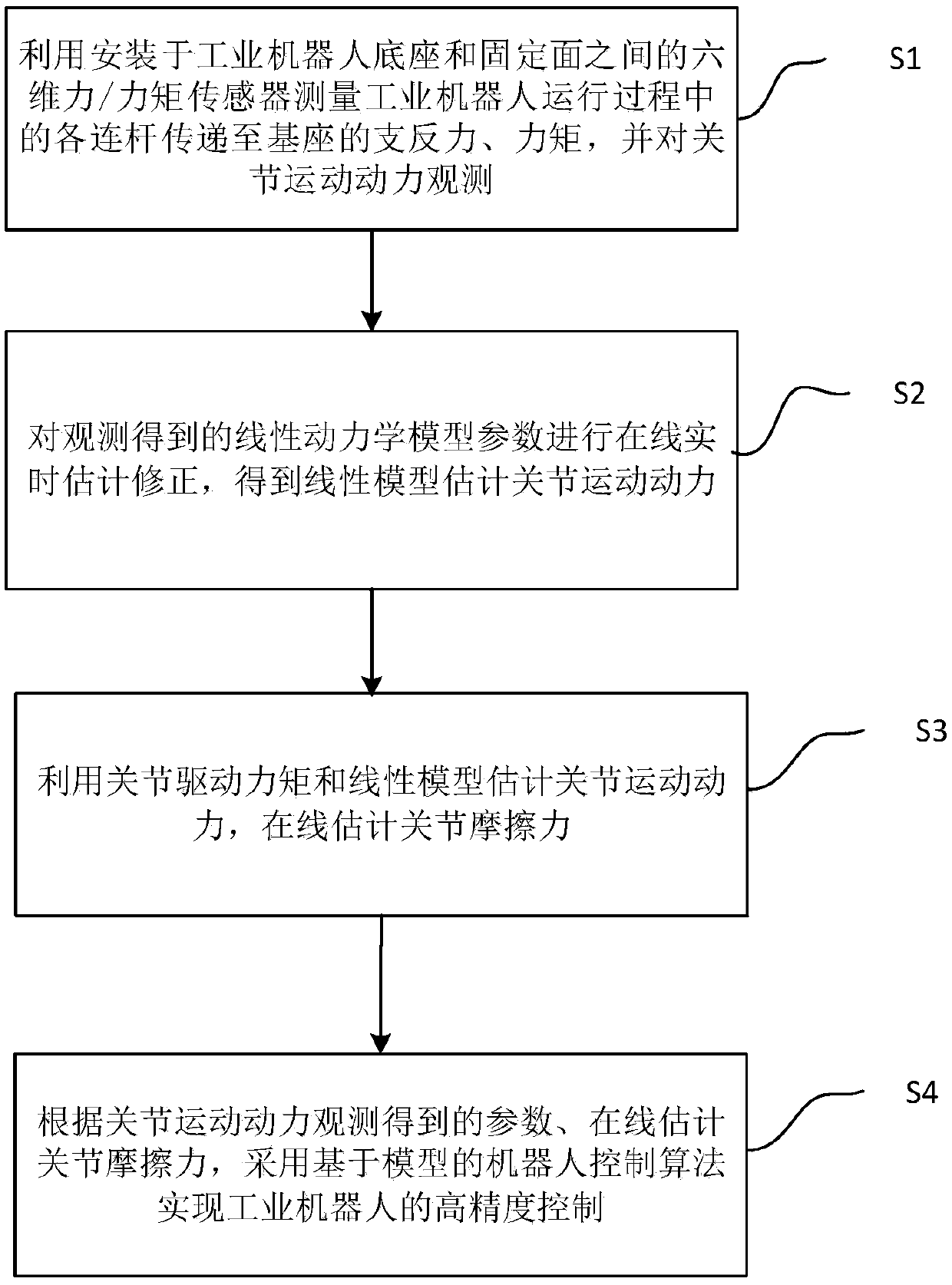
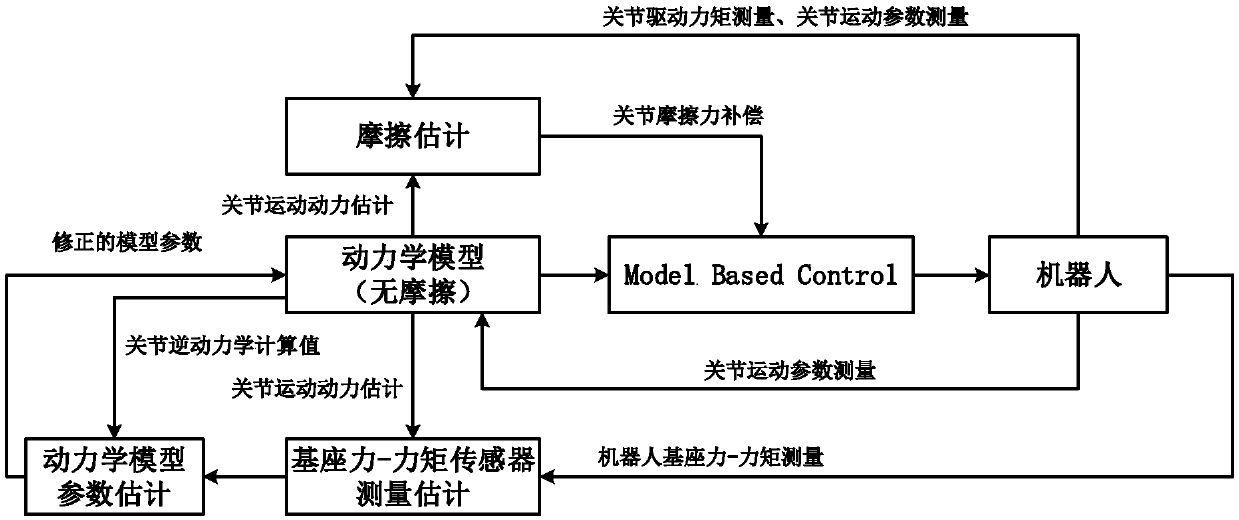
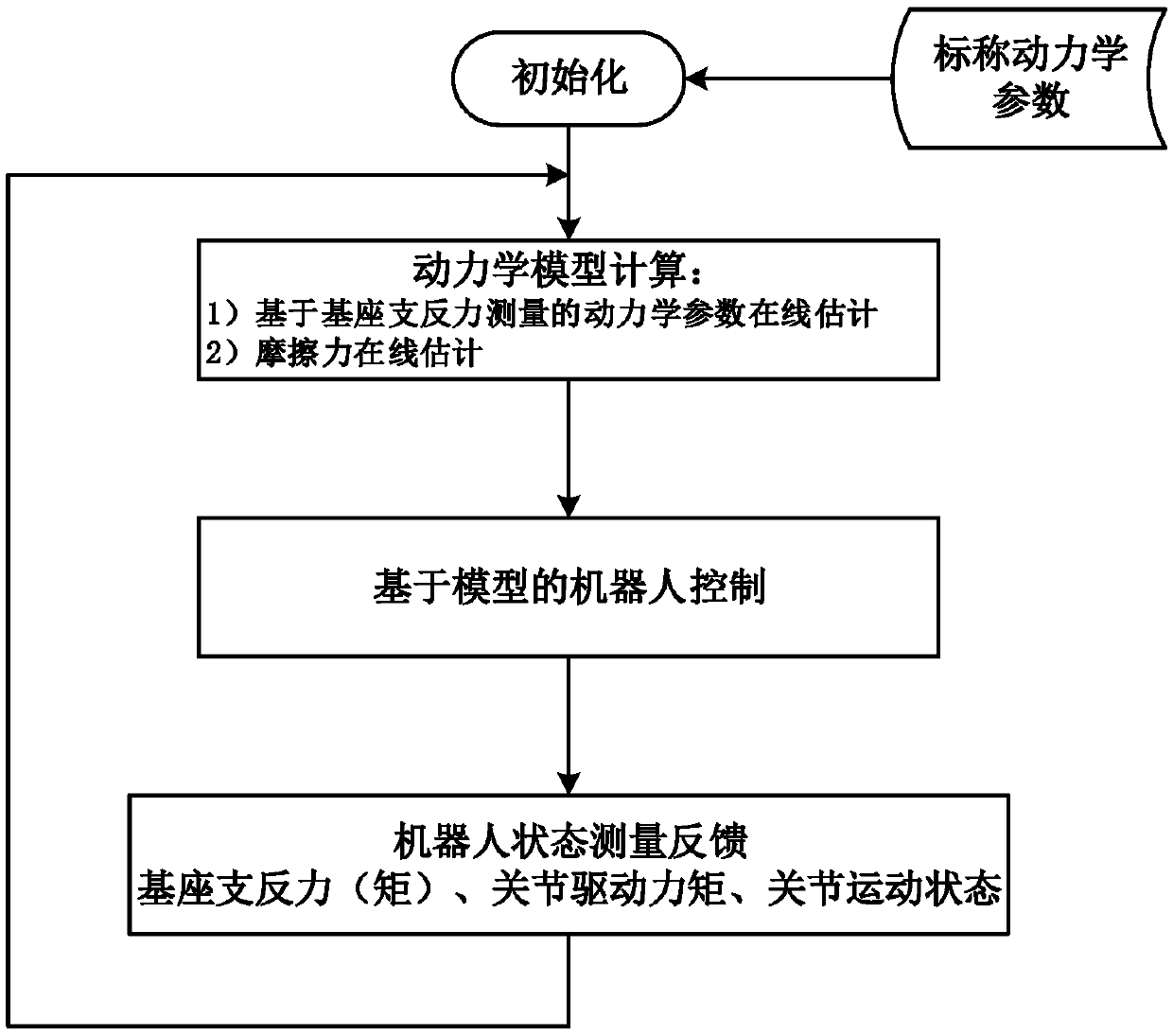
[0049] The present invention proposes a high-precision control device and method for industrial robots. The industrial robot and the six-dimensional force-moment sensor installed between the robot base and the fixed surface measure the transmission of each connecting rod to the base during the operation of the industrial robot. The support reaction force (moment) can be further calculated through dynamics to estimate the dynamics of joint motion. Among them, the joint friction force in the joint driving torque is the internal for...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More