

Cooperative perception method and system for group unmanned vehicles based on block chain
A technology of unmanned vehicles and collaborative perception, applied in the field of group unmanned driving, to achieve the effect of reliable and accurate information basis
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach
[0047] As an implementation, after the environment consensus step, it also includes:
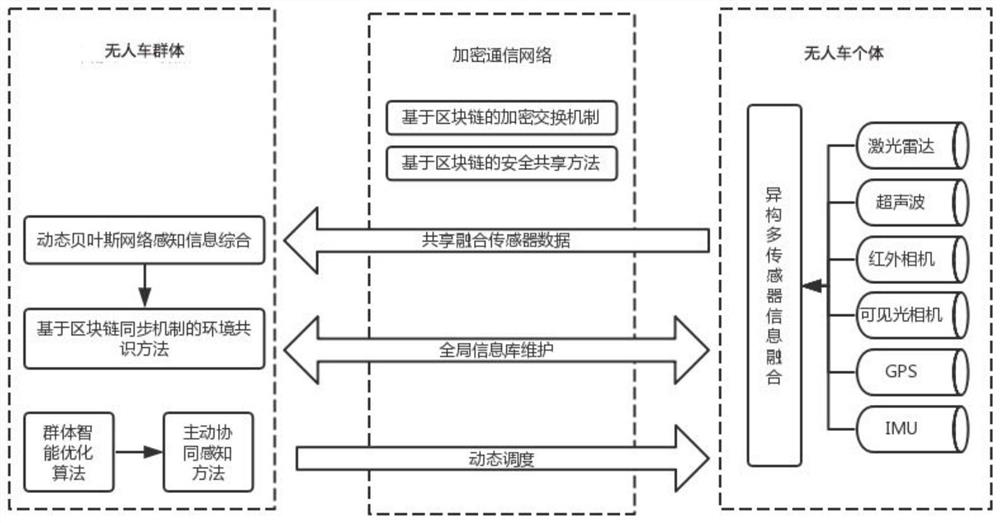
[0048] Active acquisition step: If an individual unmanned vehicle cannot obtain the environmental information required to complete the task, the blockchain-based block synchronization mechanism sends a request to the group to obtain environmental information from other individual unmanned vehicles.
[0049] As an implementation manner, the preset swarm intelligence optimization algorithm is one of ant colony algorithm, particle swarm algorithm and brainstorming algorithm.
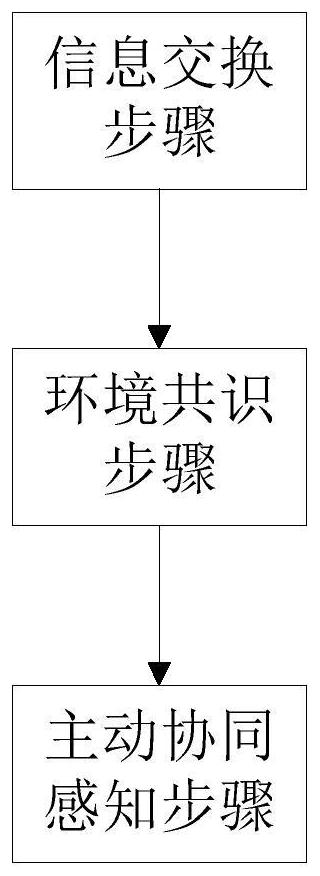
[0050] Please refer to Figure 6 , the block chain-based collective unmanned vehicle cooperative perception system of the embodiment of the present invention includes an information exchange module, an environment consensus module and an active cooperative perception module.
[0051] Information exchange module: use the encrypted communication and block synchronization mechanism of blockchain technology to build a decent...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More