

Design method of flexible bionic robot fish adopting rope redundant actuation and robot fish
A design method and technology of robotic fish, which are applied to underwater operation equipment, ships, non-rotating propulsion elements, etc., can solve problems such as poor adaptability, poor swimming speed, propulsion efficiency and maneuverability, and achieve good deformation flexibility. , Fast and efficient swimming performance, high driving efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] Below in conjunction with figure, the present invention will be further described:
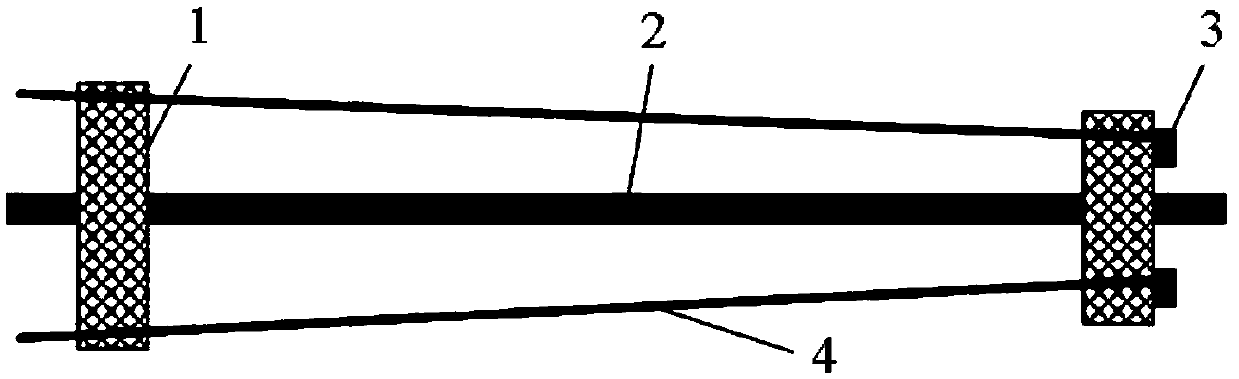
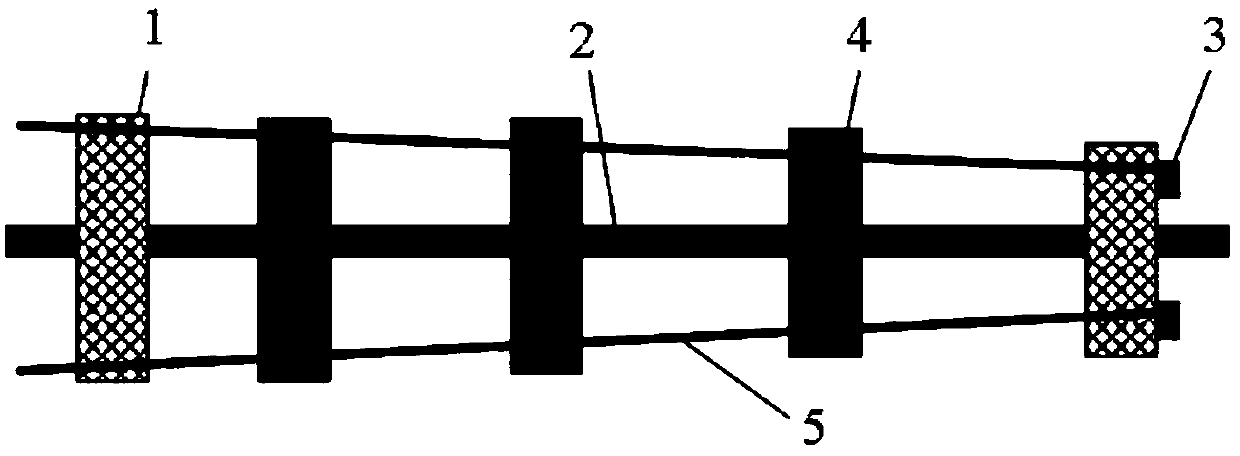
[0036] The overall structure of the robotic fish of the present invention is as follows: Figure 7 As shown, the robot fish is composed of a front part fixedly connected by a partition 9 and a flexible rear part. After the flexible rear part, a caudal fin 6 made of a flexible material is connected, and a flexible spine beam structure is arranged inside the tail of the robot fish. , the flexible spine structure such as figure 1 and 2 As shown, it includes a base plate 1 at the front and a rear, and the two base plates 1 are connected by elastic beams 2 to form an I-shaped structure. On the elastic beam 2, a plurality of vertebral hard blocks 5 are arranged at intervals. On both sides of the elastic beam 2, there are also Each is provided with at least one driving rope 4, and the driving rope 4 is connected to the bottom plate 1 in front and each vertebral hard block 5 in turn from fron...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More