

BP-RNN gearshift integral PID algorithm for automobile chassis dynamometer
A technology of automobile chassis and variable speed integration, which is applied to controllers with specific characteristics, electric controllers, etc., can solve problems such as insufficient accuracy and static error, and achieve good versatility, avoid accumulated errors, and reduce overshoot. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
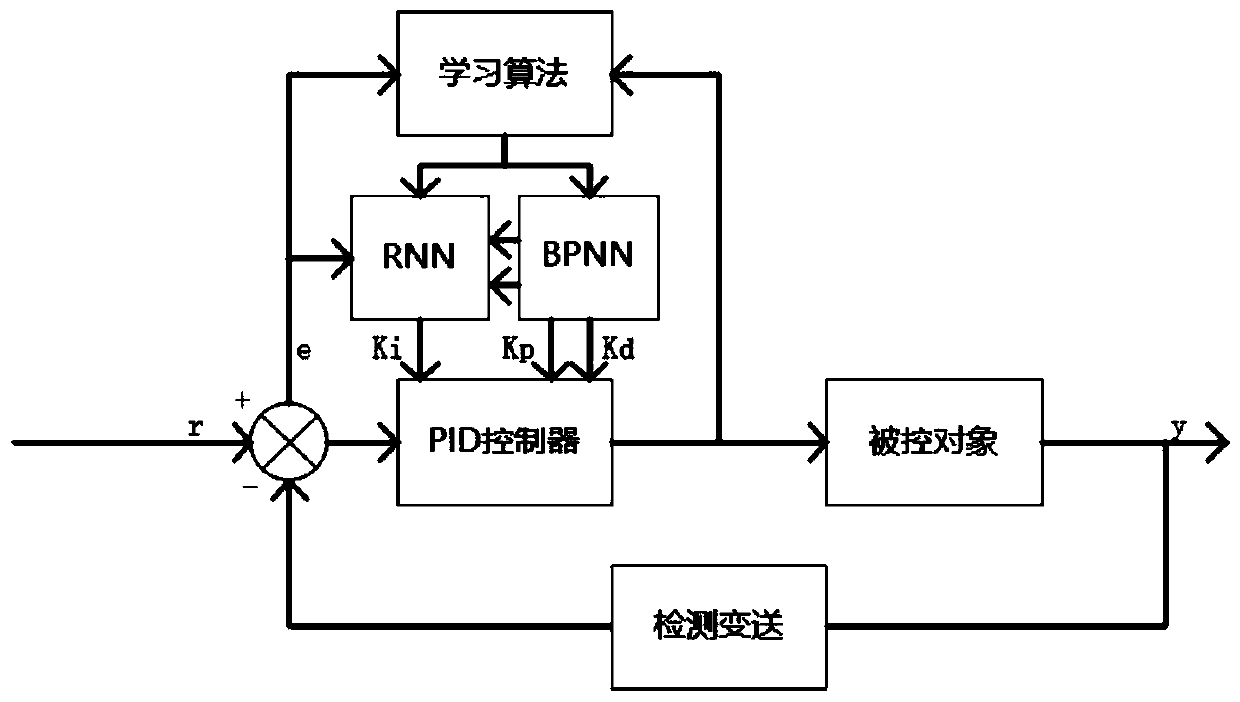
[0039] In this embodiment, a BP-RNN variable speed integral PID algorithm for automobile chassis dynamometer is disclosed, and the method includes the following steps:
[0040] Step 1: Sampling the running state of the automobile chassis dynamometer at historical moments, obtaining historical sampling data, and using the historical sampling data as a training set;
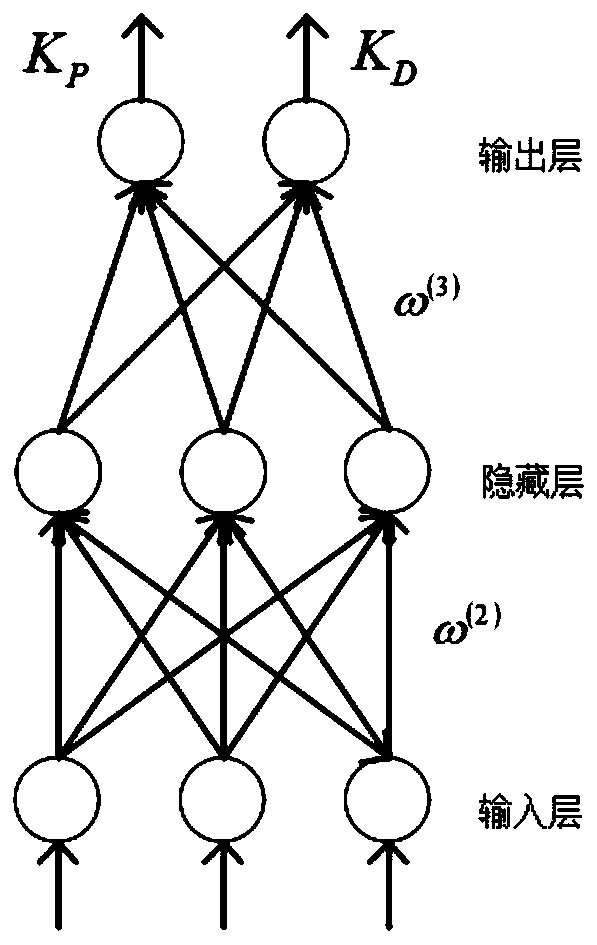
[0041] Step 2: Establish and initialize the BP neural network model, use the training set obtained in step 1 to train the BP neural network model and correct the weight coefficients of each layer of the BP neural network to obtain an optimized BP neural network model;
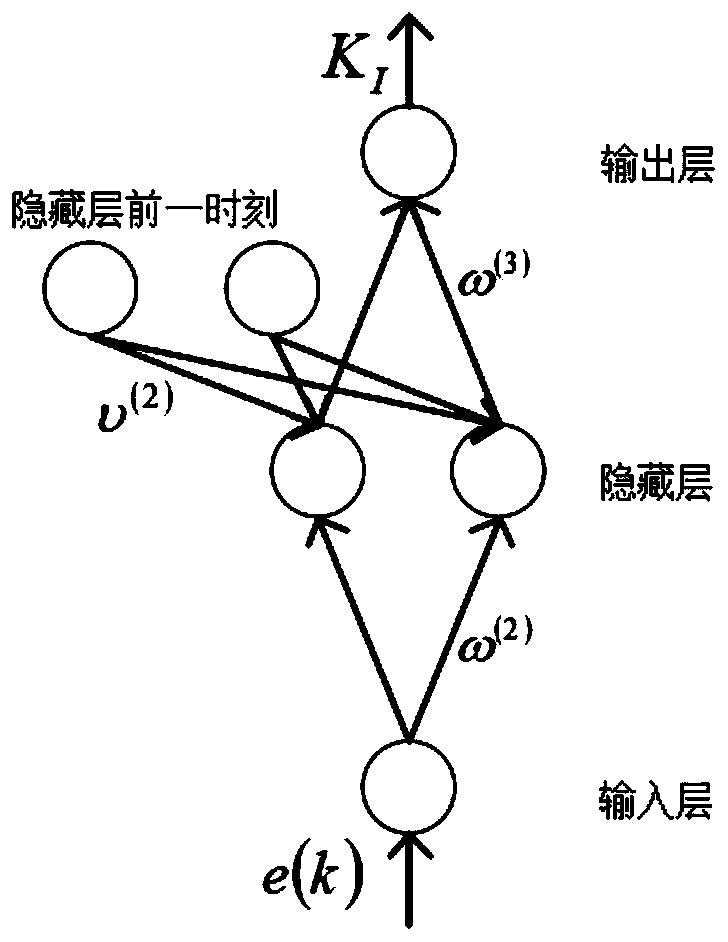
[0042] Step 3: Establish and initialize the RNN network model, use the training set obtained in step 1 to train the RNN network model and correct the weight coefficients of each layer of the RNN network to obtain an optimized RNN network model;
[0043] Step 4: Sampling the running state of the automobile chassis dynamometer at the current moment to...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More