

Method and device for planning robot time optimal trajectory based on dynamic model
A dynamic model and time-optimized technology, applied in instruments, adaptive control, control/regulation systems, etc., can solve problems such as inability to discover robot performance, increase robot cost and energy consumption, and limit robot movement speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0084] Taking a six-degree-of-freedom industrial robot as the research object, the robot's time-optimized trajectory planning is carried out according to the following steps.
[0085] A dynamic model-based robot time optimal trajectory planning method, comprising steps:
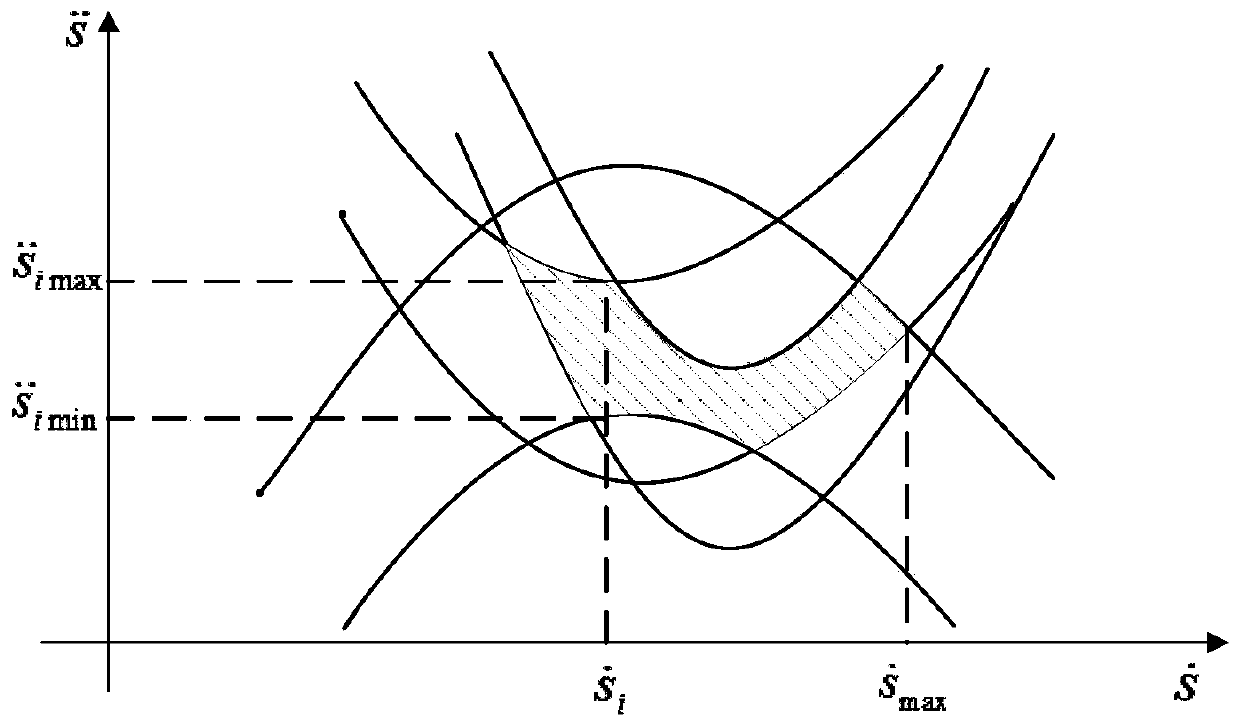
[0086] Establish the robot dynamic model and parameterize the robot's predetermined trajectory, and convert the joint torque constraints and geometric path constraints into the parameter space;
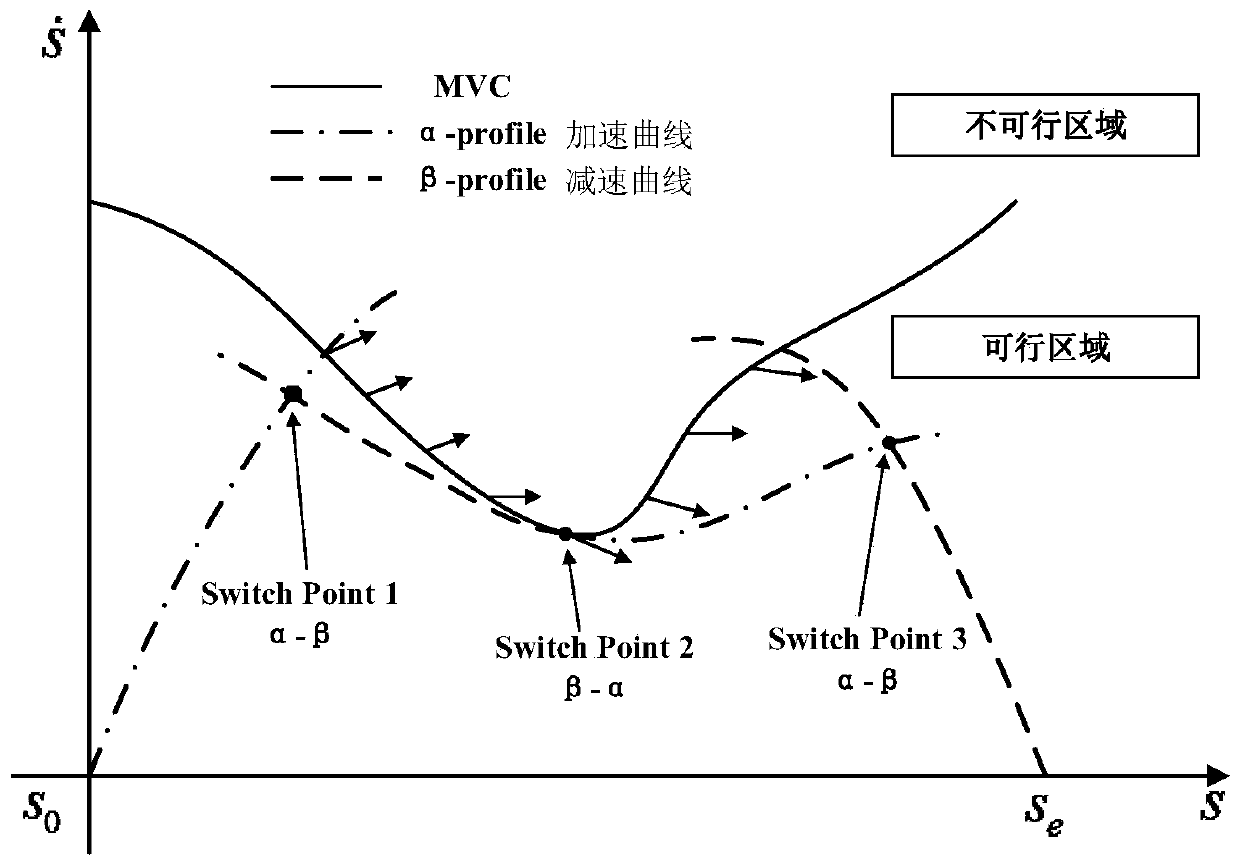
[0087] Construct an optimization problem with the shortest time as the goal and solve it by numerical integration method to obtain the optimal motion parameters of the robot;
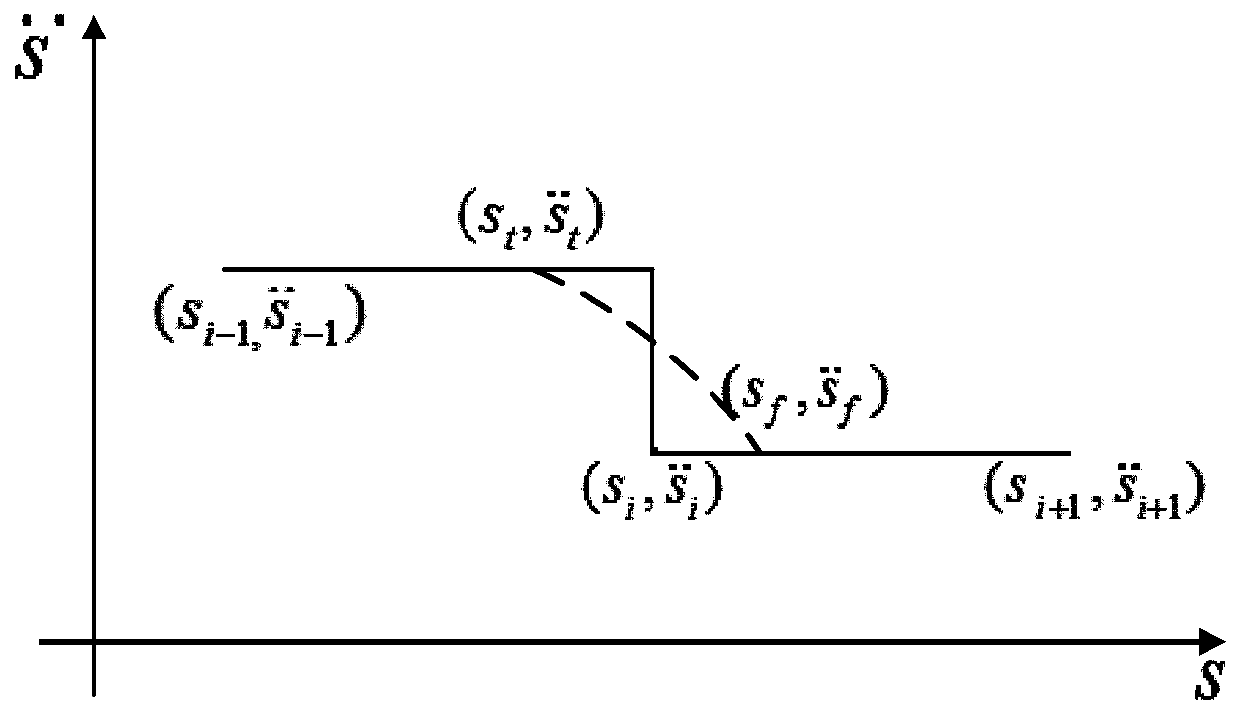
[0088] The optimized acceleration is smoothed with a cubic spline curve on the phase plane to avoid the vibration of the robot joints during the movement caused by sudden acceleration changes.
[0089] Further, the described establishment of robot dynamics model specifically includes steps:
[0090] For an n-degree-of-freedom industrial robo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More