

Under-actuated manipulator with manual synchronous control function
A synchronous control, underactuated technology, applied in the field of manipulators, to avoid tilt shift and facilitate grasping
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
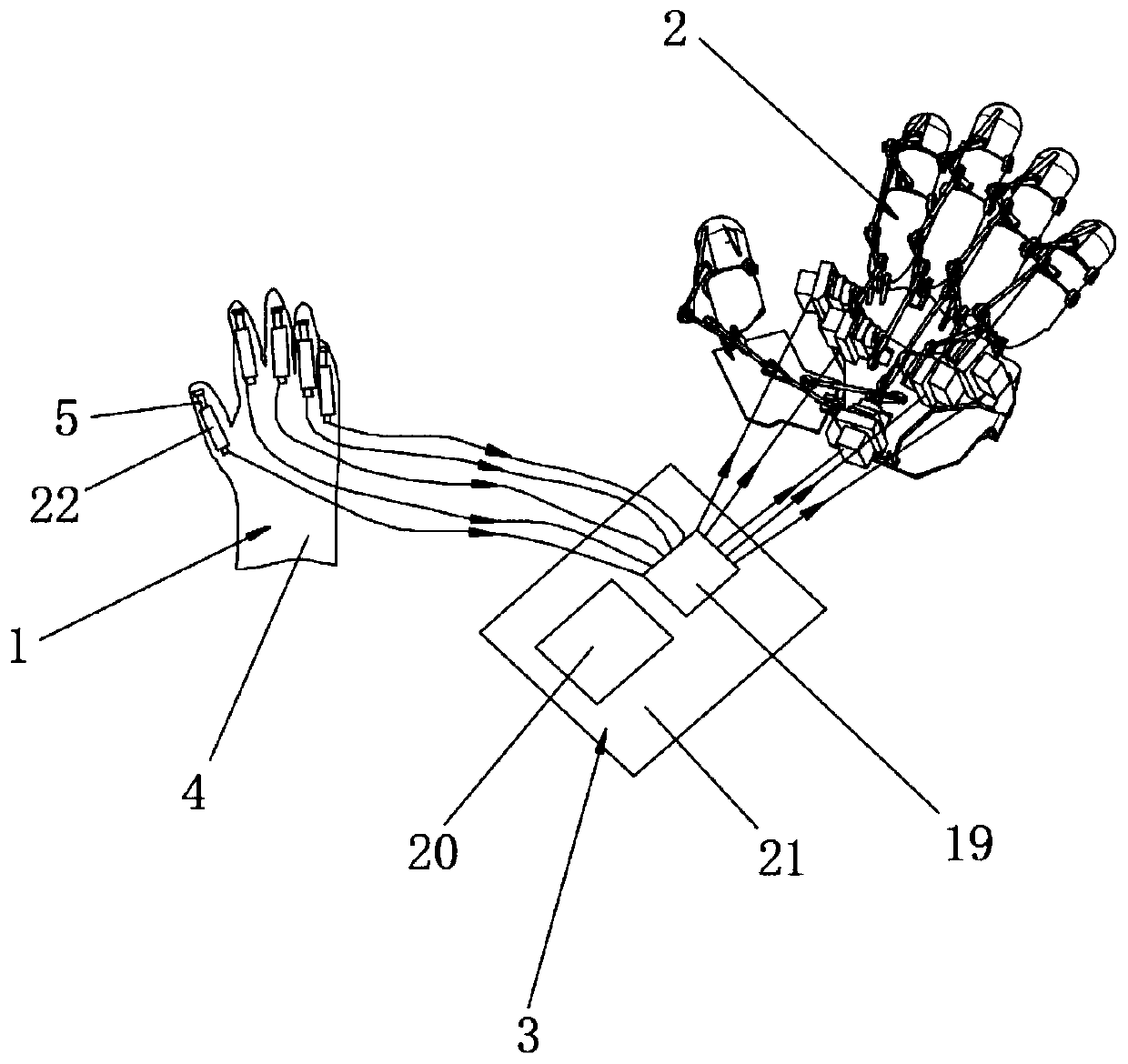
[0040] Embodiment: a kind of underactuated manipulator with manual synchronous control function, as attached Figure 1-8 As shown, it includes an induction glove body 1, an underactuated manipulator body 2 and a control module 3;
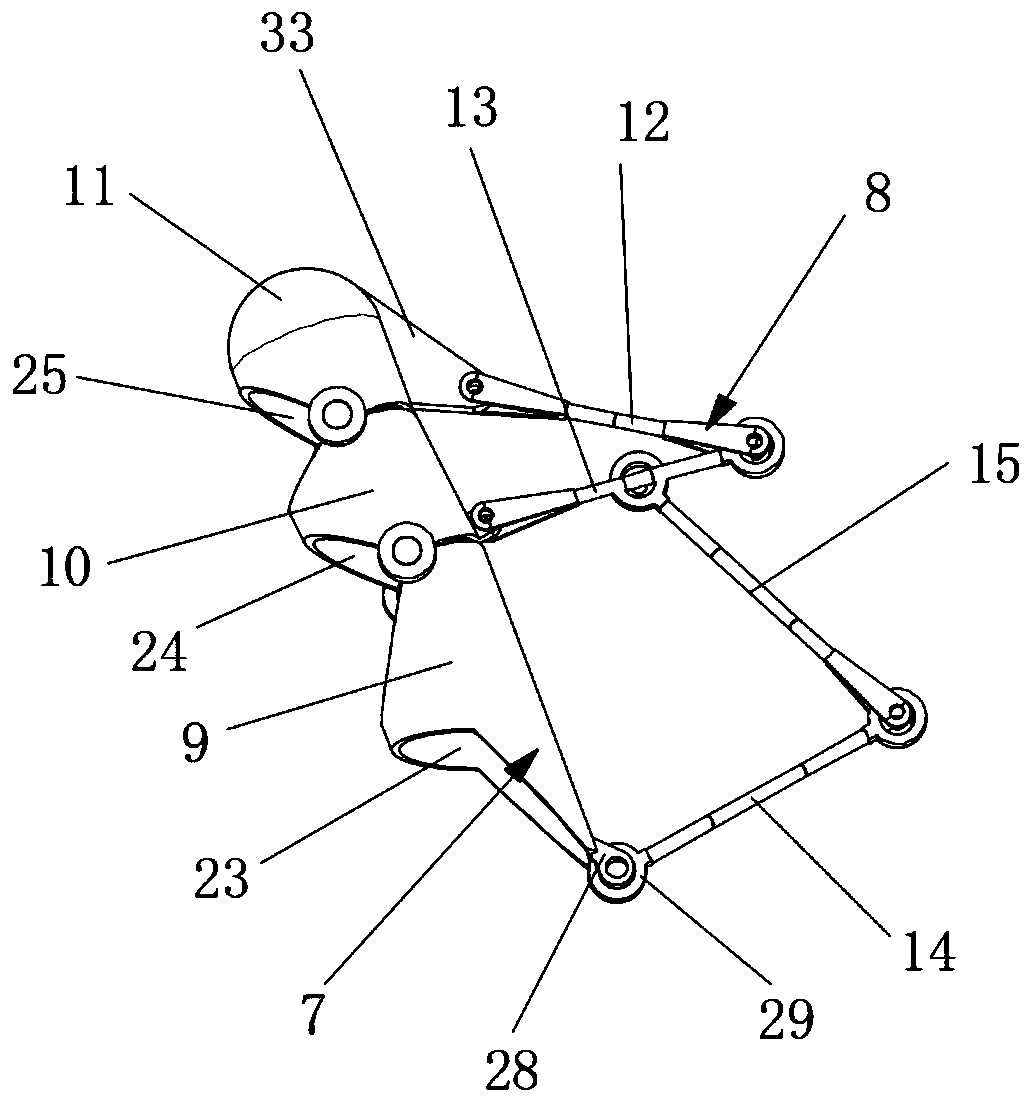
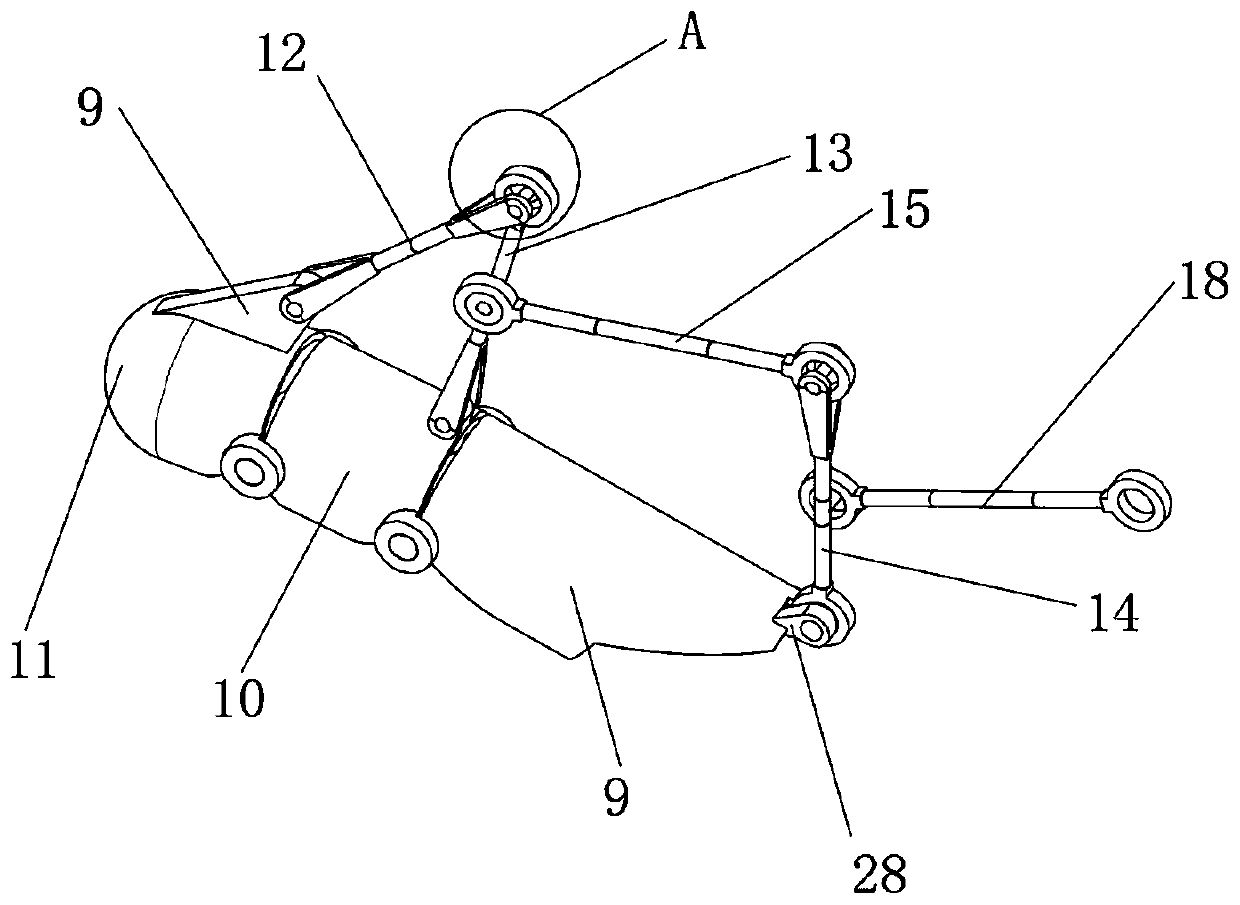
[0041] The induction glove body 1 includes a rubber glove 4 with five fingertips, the back of each fingertip of the rubber glove 4 is fixed with a resistive bending sensor 5; the underactuated manipulator body 2 includes a palm base 6, Five driving fingers 7 are connected to the palm base 6, and an under-actuated mechanism 8 is provided between each driving finger 7 and the palm base 6; , the front end of the finger root block 9 is hinged with the middle finger block 10, and the front end of the middle finger block 10 is hinged with the fingertip block 11; the present invention can perform manual synchronous control on the underactuated manipulator body 2 through the induction glove body 1, so that the underactuated manipulator The main body 2 accu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More