

Three-dimensional reconstruction method for indoor dynamic scene based on RGBD camera
A 3D reconstruction and camera technology, applied in the field of 3D reconstruction of indoor dynamic scenes, can solve the problems of poor positioning and mapping accuracy, affecting the results of mapping, and inaccurate trajectory estimation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
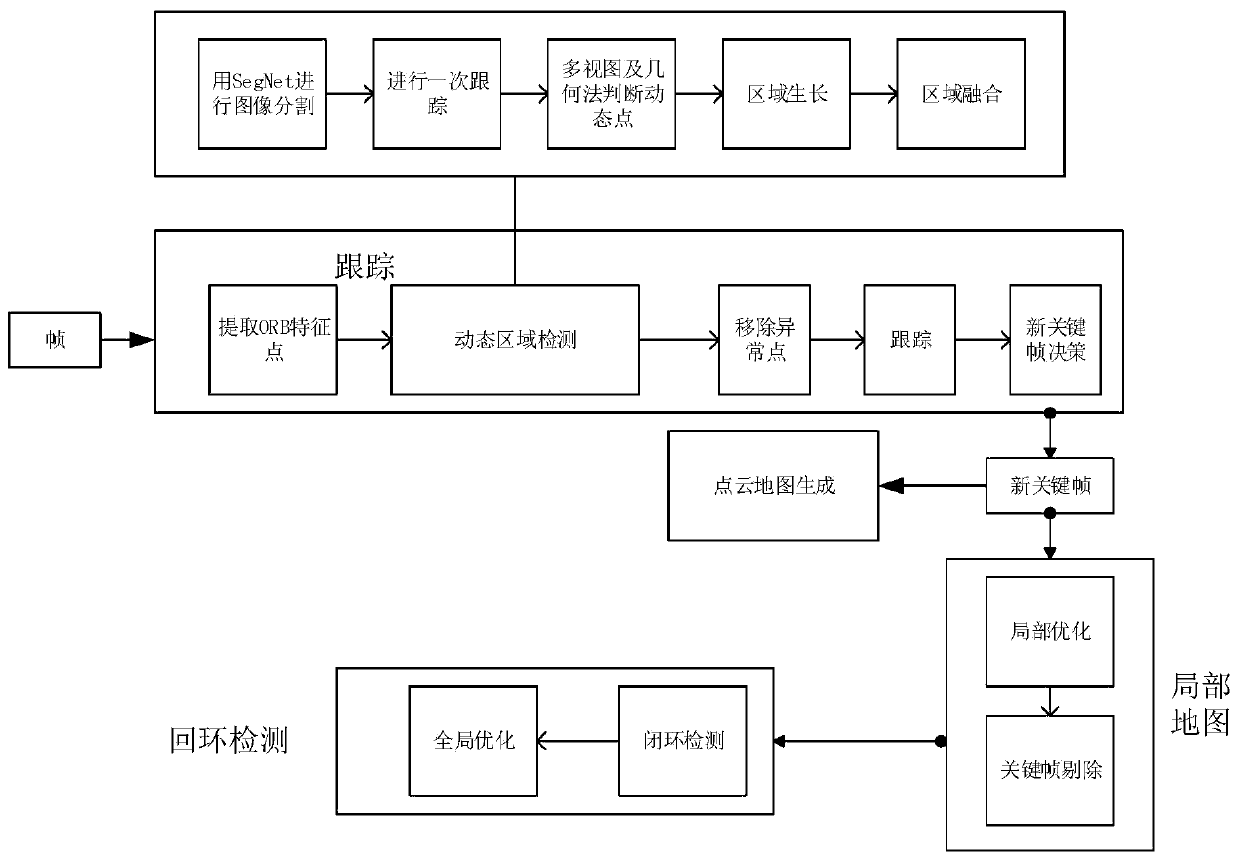
[0034] The invention discloses an indoor three-dimensional reconstruction method based on an RGBD camera, which focuses on solving dynamic objects in an indoor scene. The device is mainly composed of an RGBD camera and a PC with a GPU. The RGBD camera is a Kinect. figure 1 It is the schematic flow sheet of the system of the present invention; Concrete steps are as follows:
[0035] Calibrate the Kinect camera, get the Kinect color camera internal parameter value and depth camera internal parameter value and the transfer matrix of the depth camera and color camera.
[0036] Collect scene images: each frame includes a color map and a depth map, and use the Kinect SDK to align the color map with the depth map.
[0037] Extract feature points: use the ORB feature point algorithm to extract feature points in the color image.
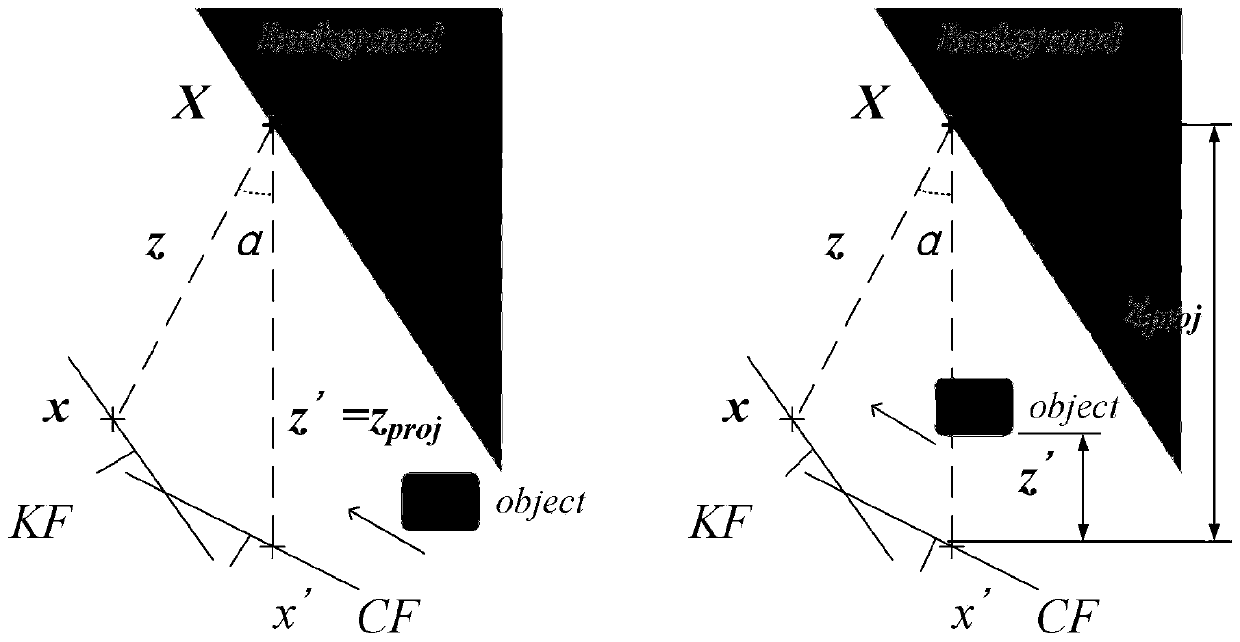
[0038] Dynamic point elimination: The present invention utilizes a combination of convolutional neural network and multi-view geometry method to eliminate d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More