

Active and passive differential mixedly-connected supporting leg and six-degree-of-freedom posture adjustment platform
An active-passive technology with a degree of freedom, which is applied to motor vehicles, lifting devices, transportation and packaging, etc., can solve the problems of excessively complex structure, large occupied space, large motion error, etc., achieve high motion accuracy, improve arbitrariness, The effect of reducing the overall height
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] Embodiments of the technical solutions of the present invention will be described in detail below in conjunction with the accompanying drawings. The following examples are only used to illustrate the technical solutions of the present invention more clearly, and therefore are only examples, rather than limiting the protection scope of the present invention.
[0048] It should be noted that, unless otherwise specified, the technical terms or scientific terms used in this application shall have the usual meanings understood by those skilled in the art to which the present invention belongs.
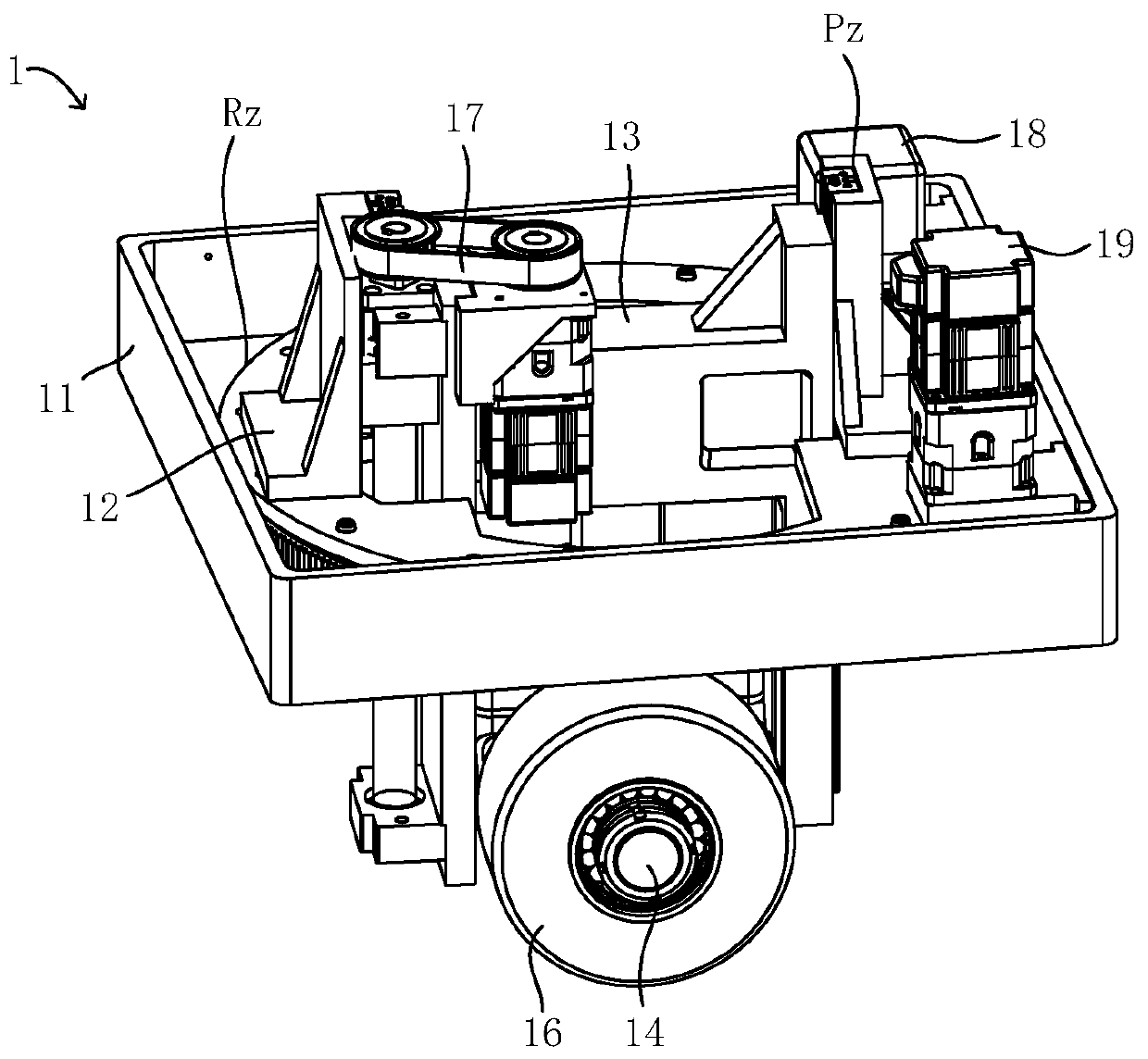
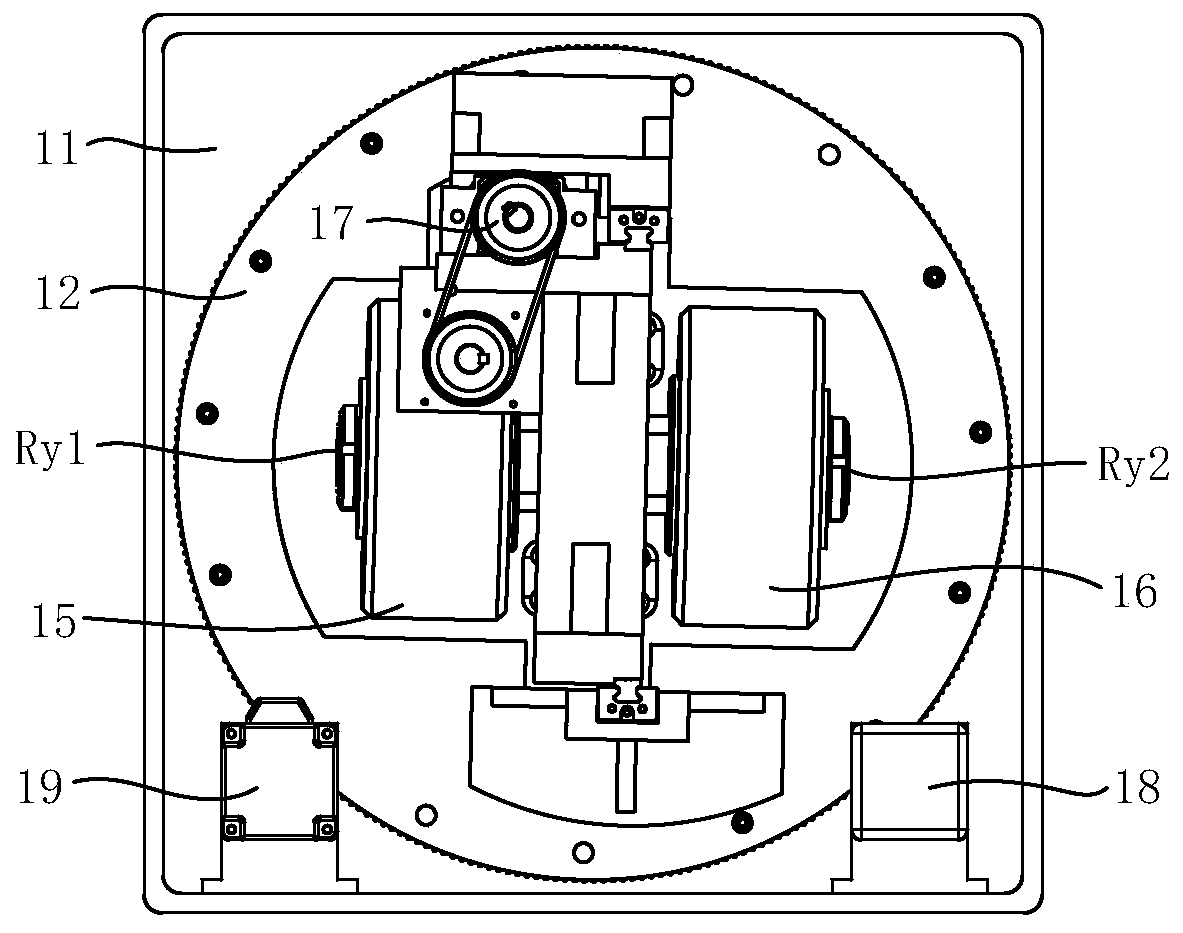
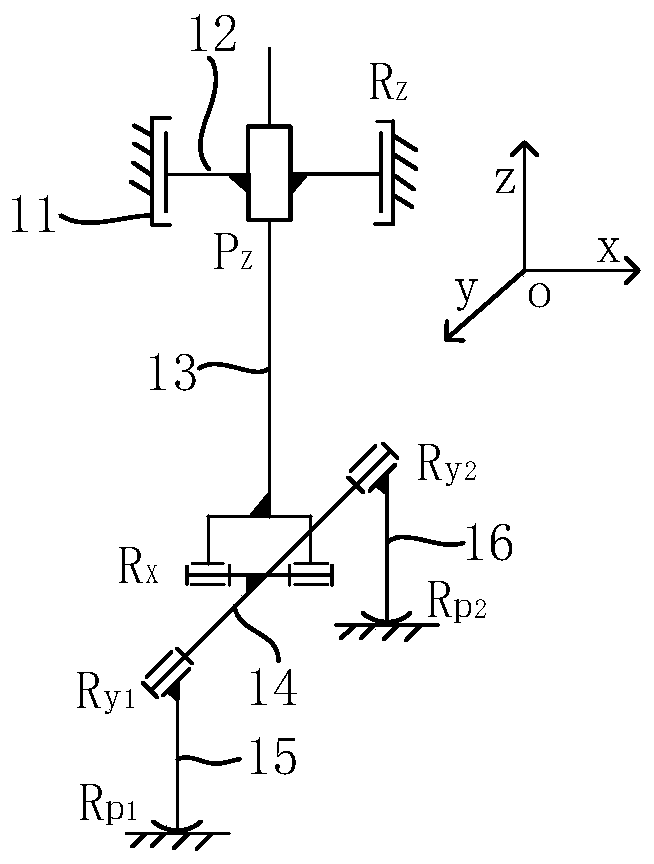
[0049] According to the first aspect of the present invention, there is provided an active and passive differential mixed outrigger, the mixed outrigger is an active and passive differential mixed outrigger, specifically, it includes a base 11, a steering table 12, a lifting Platform 13, wheel seat 14, first wheel 15, second wheel 16 and motor speed transmission system; wherein steer...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More