

A kind of robot wake-up method, system and robot
A robot and pre-awakening technology, applied in the field of intelligent robots, can solve the problems of low robot wake-up accuracy, improve the accuracy of wake-up recognition, and solve the effect of low wake-up accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
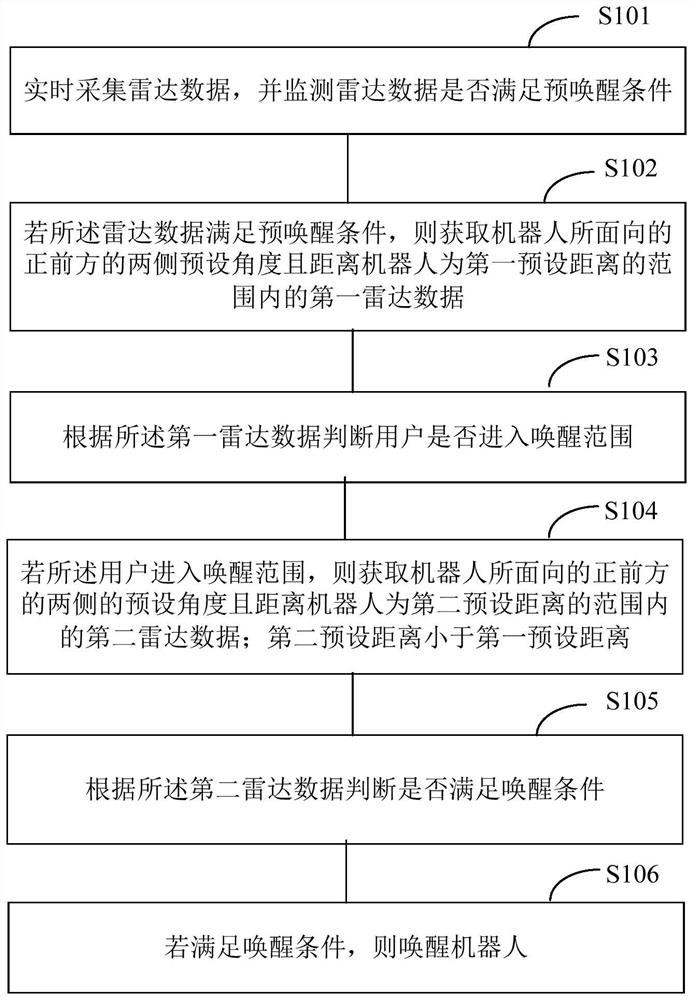
[0050] Such as figure 1 As shown, this embodiment provides a method for waking up a robot, which specifically includes:
[0051] Step S101: Collect radar data in real time, and monitor whether the radar data meets the pre-awakening condition.
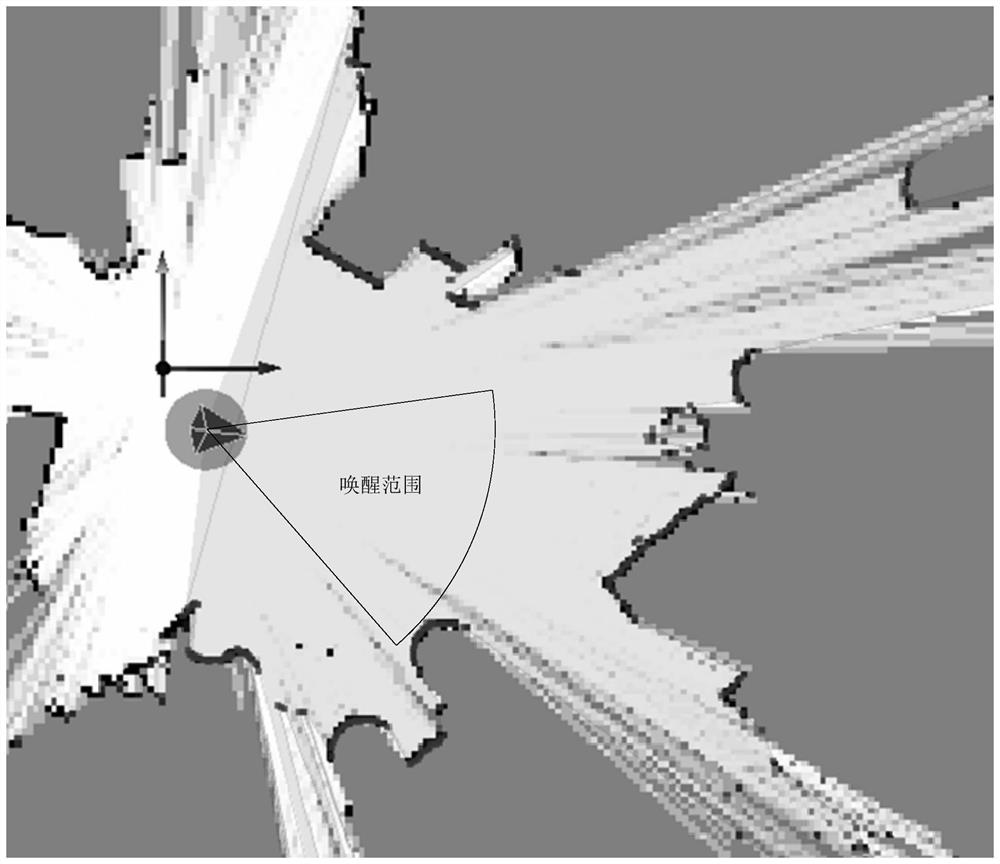
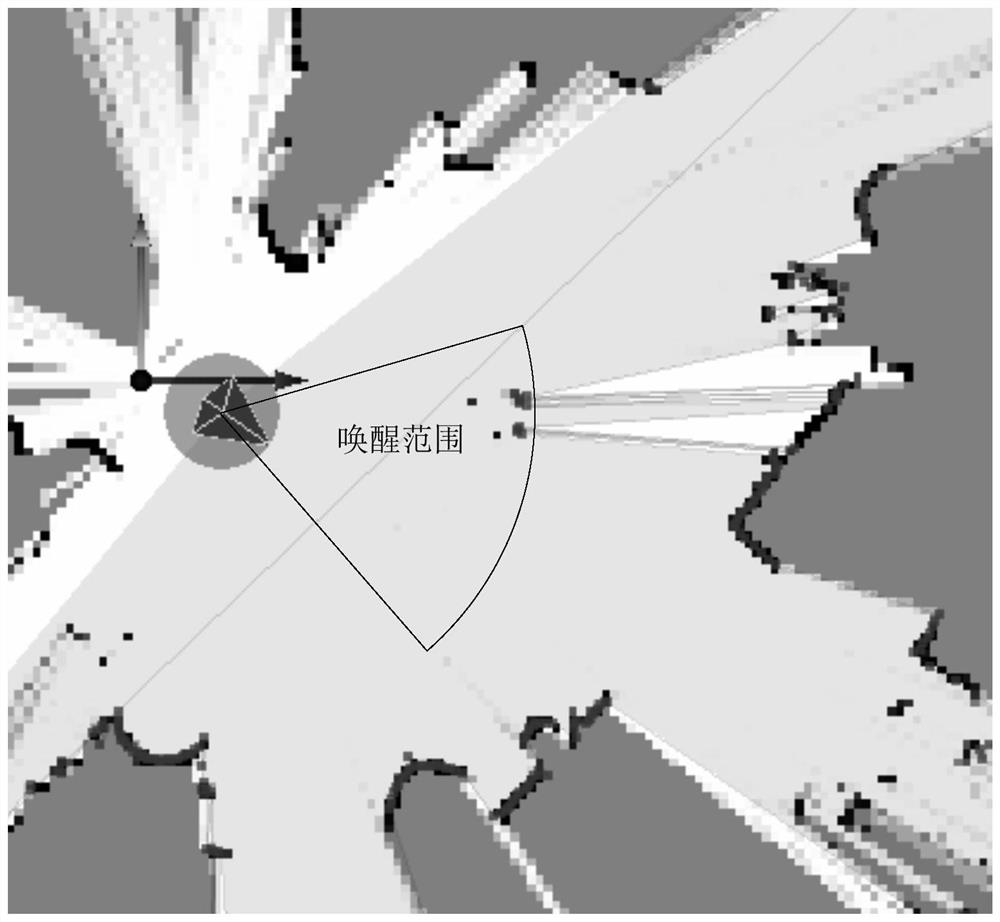
[0052] In a specific application, the radar data is collected in real time by the radar monitoring module installed in the robot body, and whether the pre-wake-up condition is satisfied is judged according to the radar data, wherein the pre-wake-up condition refers to whether the number of data points of the radar data increases by the first number threshold, When the number of data points of the radar data increases to the first number threshold, it indicates that a user may enter the wake-up range at this time, so it is necessary to further confirm whether the user enters the wake-up range. Wherein, the wake-up range refers to a fan-shaped area with any point on the longitudinal axis of the robot body as the center, the first preset ...
Embodiment 2
[0077] Such as image 3 As shown, in this embodiment, step S101 in Embodiment 1 specifically includes:
[0078] Step S201: Collect radar data in real time through the radar monitoring module.
[0079] In a specific application, the reflected radar data is collected in real time through the radar monitoring module installed in the robot body.
[0080] Step S202: Monitoring changes in the number of data points of the radar data.
[0081] Step S203: Determine whether the radar data satisfies the pre-awakening condition according to changes in the number of data points of the radar data; if the number of data points of the radar data increases to a first number threshold, determine that the radar data satisfies pre-wake-up condition.
[0082] In a specific application, by analyzing changes in the number of data points of the radar data, it is determined that the radar data satisfies the pre-awakening condition when the number of data points of the radar data increases to a firs...
Embodiment 3
[0084] Such as Figure 4 As shown, in this embodiment, step S103 in Embodiment 1 specifically includes:
[0085] Step S301: Obtain the first radar data through the radar monitoring module.
[0086] In a specific application, when the pre-wake-up condition is met, the radar monitoring module acquires the first radar data within the wake-up range.
[0087] Step S302: Count the number of data points of the first radar data.
[0088] Step S303: If the number of data points of the first radar data satisfies a second number threshold, determine that the user enters a wake-up range.
[0089] In a specific application, the number of data points of the first radar data within the wake-up range is counted. According to the number of data points of the first radar data, it is judged whether the number of data points meets the second number threshold, and if the number of data points of the first radar data meets the second number threshold, it is determined that the user enters the wa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More