

A vehicle-mounted DR navigation method based on odometer scale coefficient correction
A technology of scale coefficient and navigation method, applied in the fields of inertia and navigation, can solve problems such as large positioning error
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] In order to better understand the above-mentioned technical solution, the above-mentioned technical solution will be described in detail below in conjunction with the accompanying drawings and specific implementation methods.
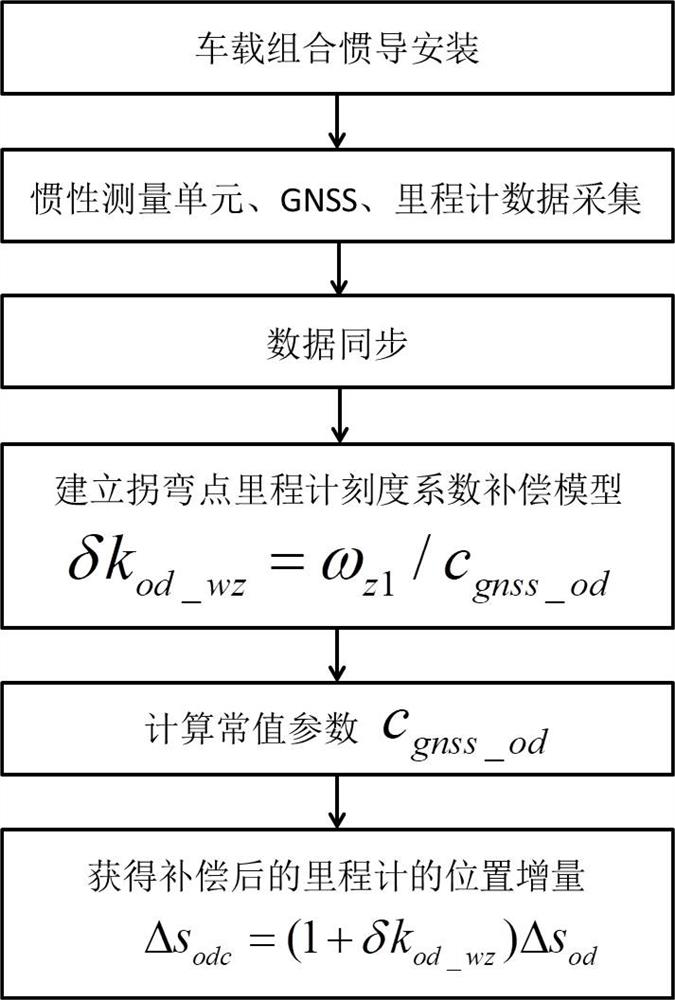
[0032] This embodiment provides a vehicle-mounted DR (dead reckoning, dead reckoning) navigation method based on odometer scale coefficient correction, which mainly includes the following steps:
[0033] Step 1, the vehicle-mounted inertial integrated navigation system is installed on the vehicle-mounted platform, the vehicle-mounted inertial integrated navigation system includes an inertial measurement unit, GNSS, and odometer; the data information of the acquisition inertial measurement unit, the data information of the GNSS, and the data information of the odometer , and perform time synchronization on the three kinds of data information.
[0034] Step 2. Establish a compensation model for the scale coefficient of the odometer at the turning p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More