

An Indoor Pedestrian Navigation Method Based on Self-backtracking Algorithm
A pedestrian navigation and backtracking algorithm technology, applied in the field of indoor pedestrian navigation and positioning, can solve the problems of poor accuracy, poor long-term accuracy and high cost, and achieve the effect of improving the positioning and attitude accuracy and increasing the hardware cost.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
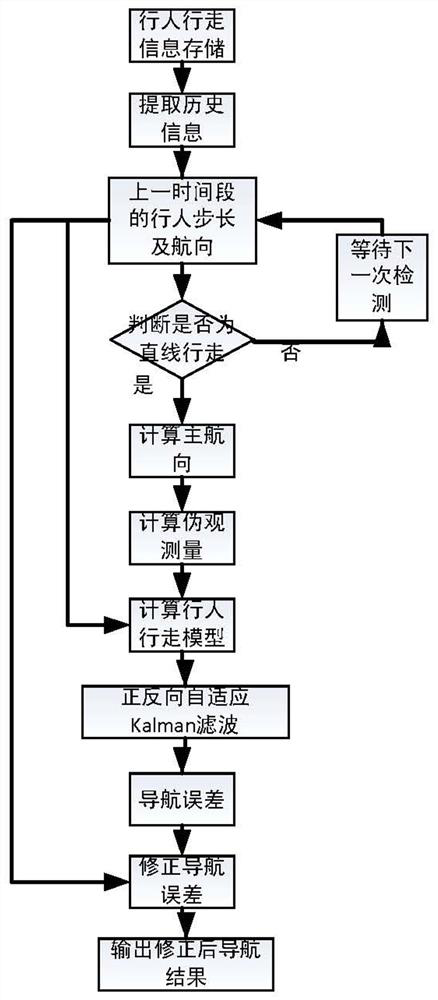
[0062] An indoor pedestrian navigation method based on a self-backtracking algorithm, the pedestrian being navigated wears MEMS
[0063] Sensor, wherein the steps of the navigation method include:
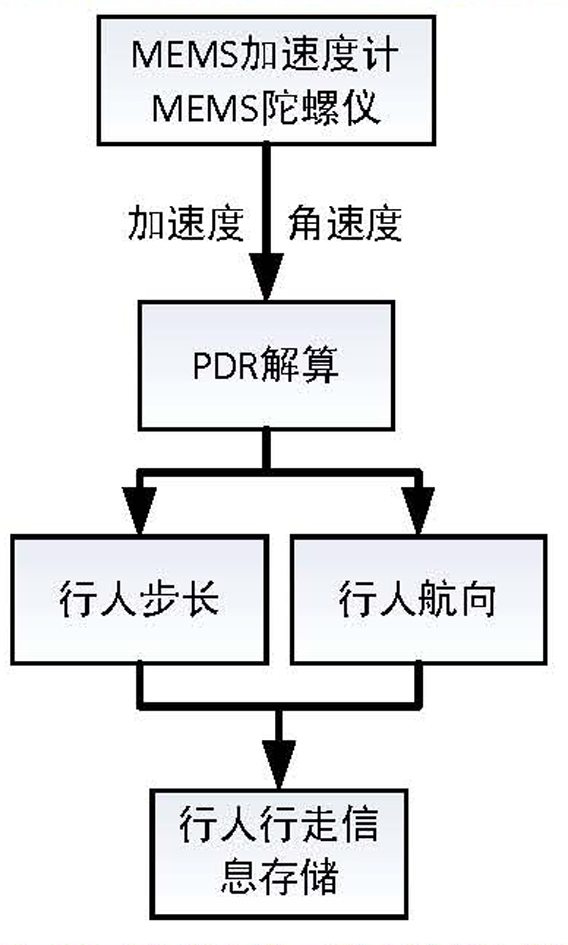
[0064] Step 1: Perform pedestrian gait calculation based on MEMS gyroscope and MEMS accelerometer to obtain pedestrian walking information for a period of time, and perform straight line detection on the walking information during this period of time.
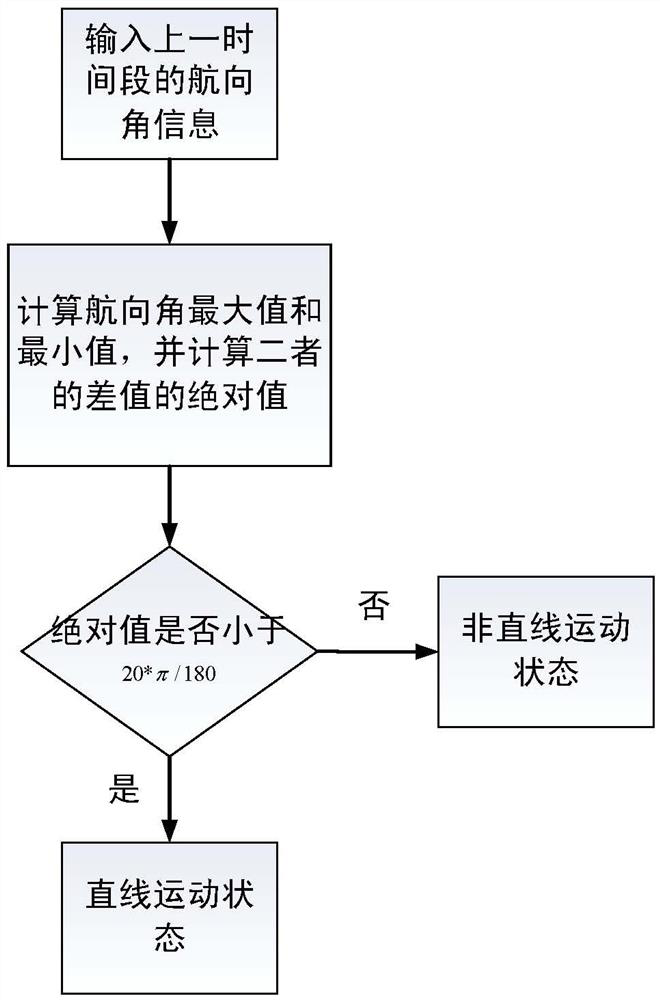
[0065] Step 2: Determine whether the pedestrian's walking route in this time period is a straight line, if it is determined that the pedestrian is walking in a straight line, perform step 3, otherwise return to step 1. The walking information includes the pedestrian's position, heading angle and step length;
[0066] Step 3: Construct pseudo-observation based on heading angle information, and use forward and backward adaptive Kalman filter algorithm to detect and correct navigation errors;
[0067] Step 4: Repeat steps 1 to 3, continue to per...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More