

Method, device and storage medium for positioning and attitude determination of a robot
A technology for positioning and attitude determination and robotics, which is applied in the directions of instruments, navigation, surveying and navigation, etc., and can solve the problems of uncontrollable positioning effect and reduced accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
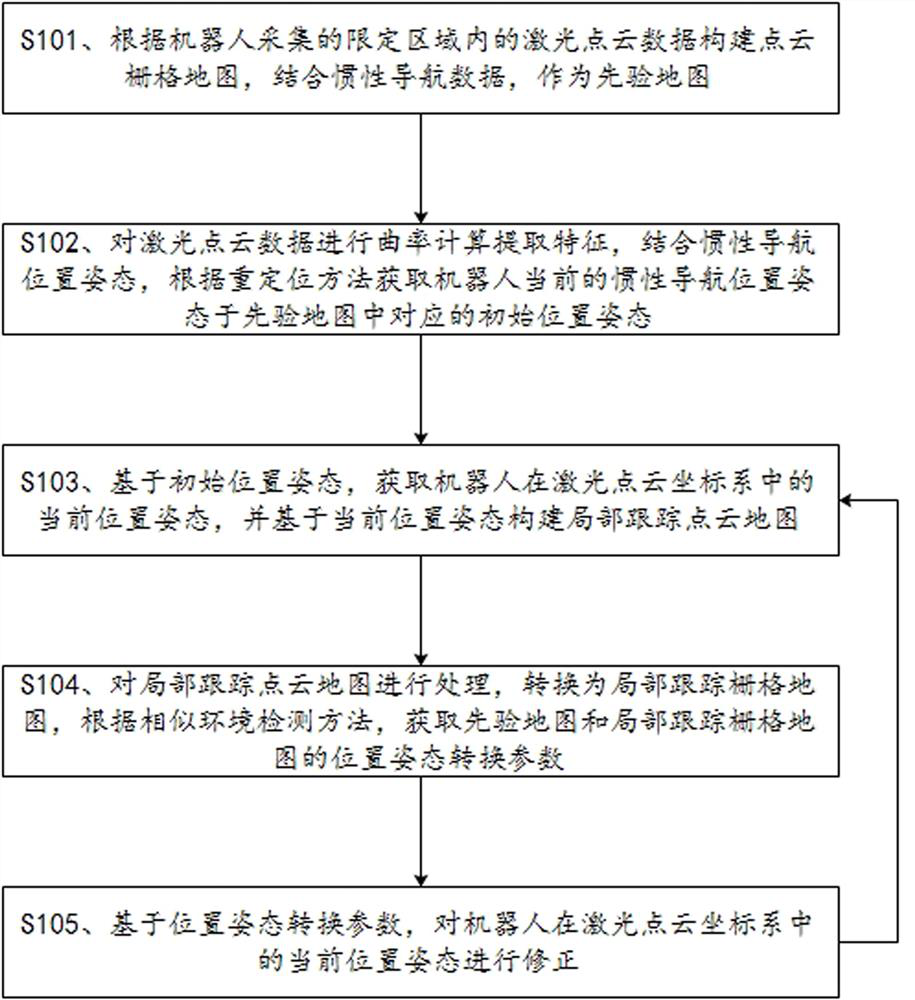
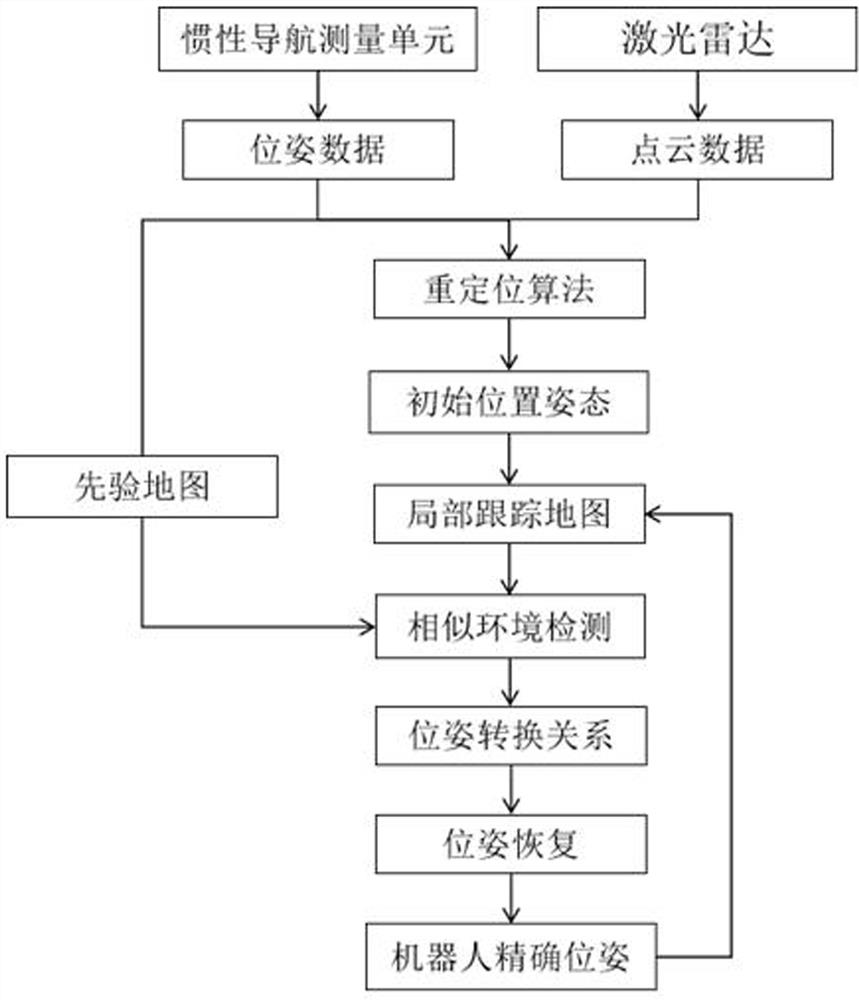
Method used
Image

Examples
Embodiment Construction
[0020] Embodiments of the present invention are described in detail below, examples of which are shown in the drawings, wherein the same or similar reference numerals designate the same or similar elements or elements having the same or similar functions throughout. The embodiments described below by referring to the figures are exemplary only for explaining the present invention and should not be construed as limiting the present invention.
[0021] In the existing positioning and attitude determination technology, the robot positioning and attitude determination method generally uses differential GNSS and inertial navigation for combined navigation to obtain position and attitude information. GNSS positioning is easily disturbed by external weather and environmental factors, and inertial navigation has high instantaneous positioning accuracy. However, errors accumulate over time and accuracy is reduced. Although the combination of the two can complement each other, it still b...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More