

Water surface cleaning robot salvage system based on Aliyun and convolutional neural network algorithm
A convolutional neural network and cleaning robot technology, which is applied to the cleaning of open water surfaces, motor vehicles, and water conservancy projects, can solve problems such as low salvage efficiency, low work efficiency, and stuck oars, and achieve efficient salvage and improve garbage collection. The effect of collection volume
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The present invention will be further described in further detail below with reference to the drawings and examples.
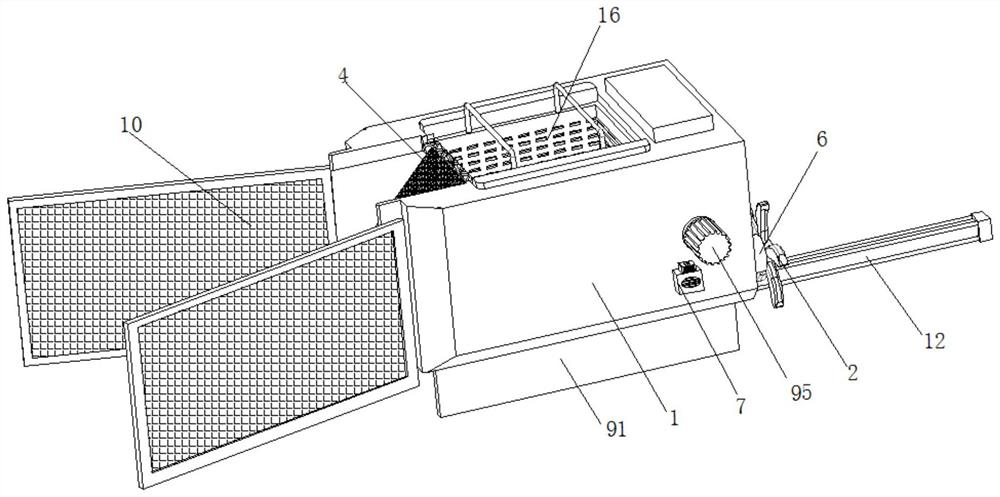
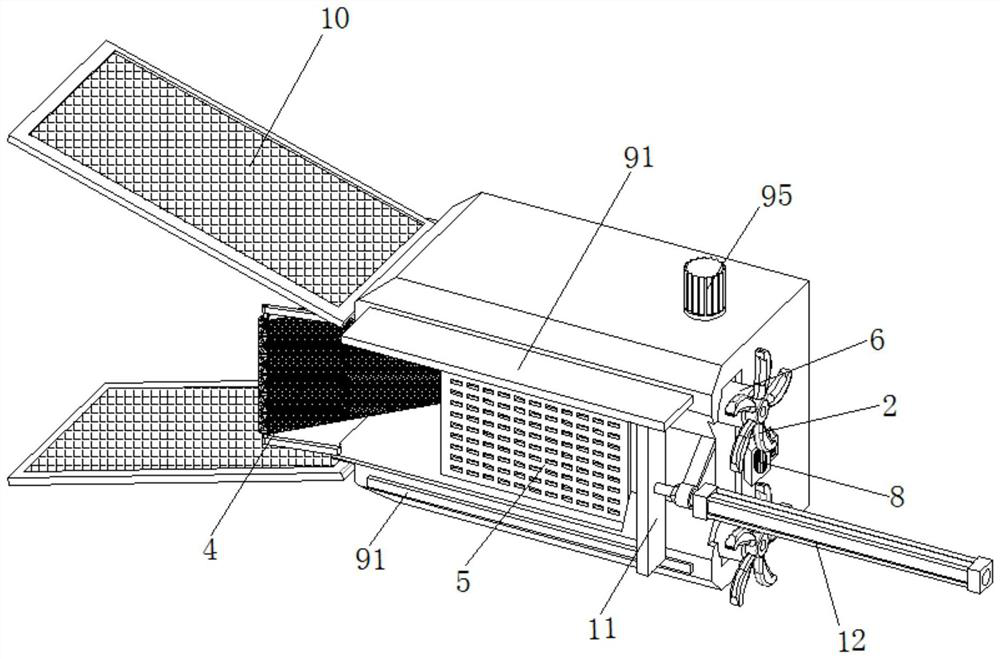
[0027] like Figure 1-8 As shown: a water surface cleaning robot based on Alibaba Cloud and Convolutional Neural Network Algorithm, the front end of the hull 1 is installed for the front to avoid, and the above is also installed with a camera 18, collecting the front image, for the front object Identify, process.
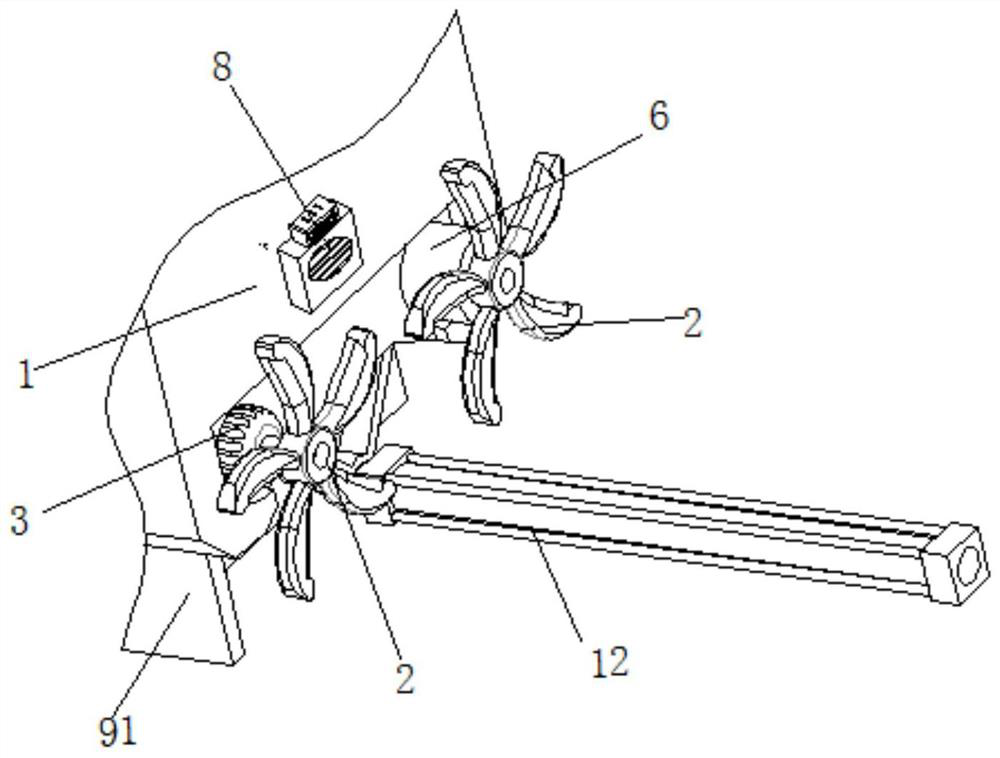
[0028] The hull 1 is equipped with a control device such as a hull 1 control panel, and the rear side has a symmetrical mounting hole, which is connected to the propeller 2, and the propeller motor 3 in the propeller 2 is connected to the control panel. The propeller 2 is always vertically, guaranteed The balance of the hull 1 control.
[0029] A seal sleeve 6 is provided between the rotating shaft 94 and the drive shaft 94 rotating, and the carrier is disposed to avoid garbage, and the water is wrapped.
[0030] The garbage collection box 5 is pl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More