

Surgical navigation system and method based on spinal surgery auxiliary robot
A surgical navigation and robot technology, applied in the field of medical devices, can solve problems such as the inability to visually determine the vertebral body lesions in the surgical process, the patient's secondary trauma, and the lack of three-dimensional reconstruction of the spine and vertebrae, etc., to achieve spatial registration, facilitate surgery, The effect of improving surgical efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
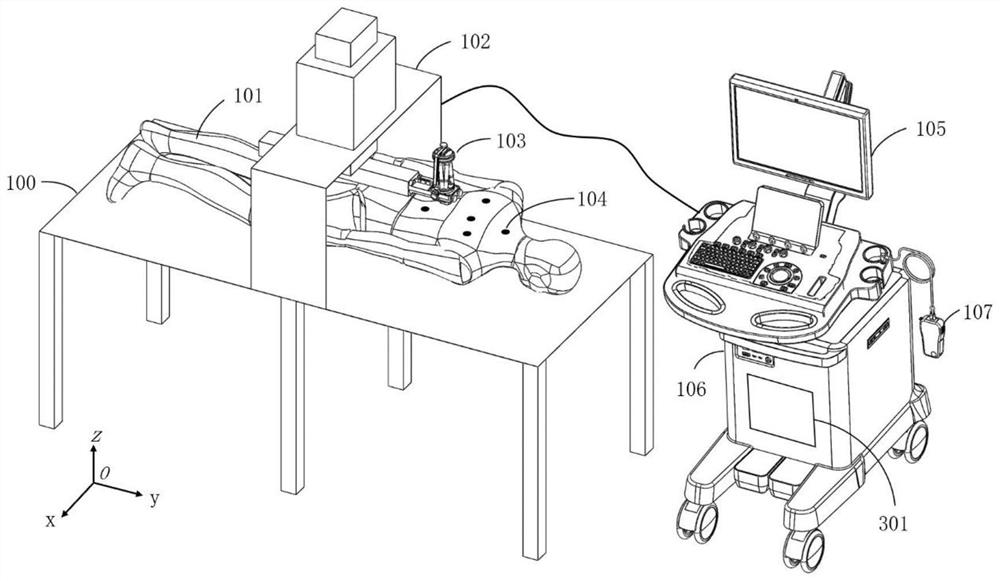
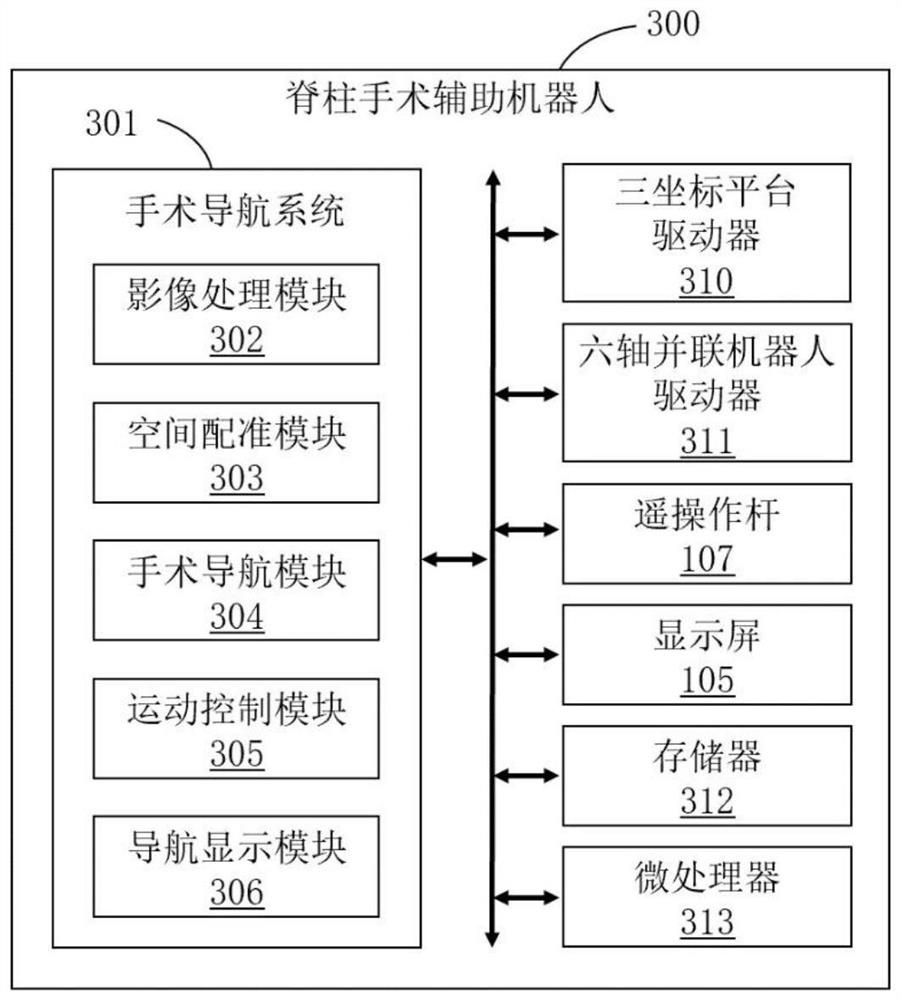
[0041] see figure 1 , a surgical navigation system based on an assistant robot for spine surgery, including:
[0042] an image processing module for processing the CT data of the patient's spine, segmenting the spine vertebra instance from the rest of the human body, and three-dimensionally reconstructing the segmented spine vertebra instance;
[0043] The spatial registration module is used to calculate the spatial registration relationship between the image coordinate system and the robot coordinate system;
[0044]a surgical navigation module, used by the doctor to select the position and surgical direction of the lesion area in the three-dimensional reconstructed spinal vertebra instance, and obtain the position and surgical direction of the lesion area in the robot coordinate system according to the spatial registration relationship, and According to the position of the lesion area and the surgical direction in the robot coordinate system, the doctor selects the installa...
Embodiment 2
[0048] This embodiment is basically the same as the first embodiment, and the special features are:
[0049] In this embodiment, the spatial registration module uses bio-electrodes pasted on the back of the patient as the target points, and the doctor picks up these target points in the image coordinate system and the robot coordinate system respectively, obtains the coordinate value of the target point, and performs Helmert transformation, Determine the spatial registration relationship between the image coordinate system and the robot coordinate system.
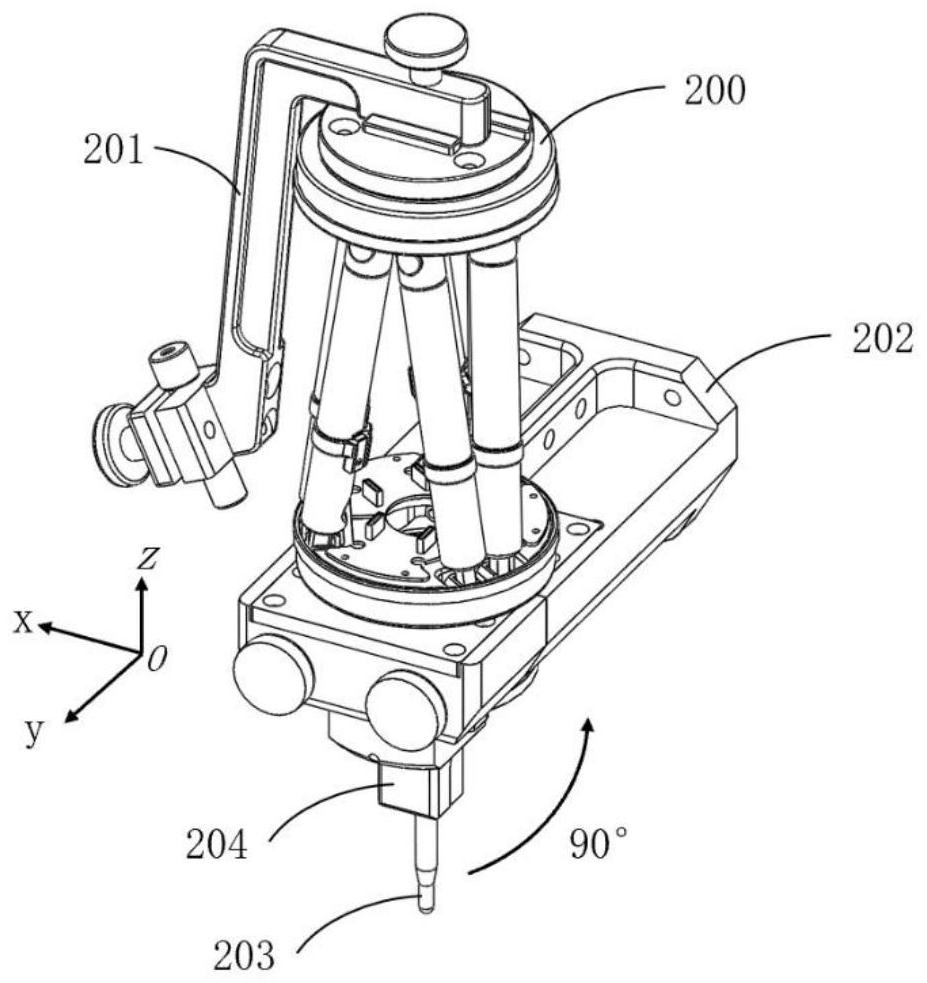
[0050] In this embodiment, the number of the target points is at least 5, and the method of picking up the target points in the robot coordinate system is that the doctor controls the space registration probe under the Y-axis end of the three-coordinate platform through the teleoperation stick to register with these targets. Point contact to get the coordinate values of these target points in the robot coordinate system. ...
Embodiment 3
[0057] This embodiment is basically the same as the above-mentioned embodiment, and the special features are:
[0058] In this embodiment, a surgical navigation method based on a spinal surgery assistant robot includes preoperative planning, intraoperative execution, and postoperative evaluation;
[0059] 1) The steps of the preoperative planning include:
[0060] 1-1) The patient is anesthetized, and the target for the spatial registration is pasted on the back of the patient, and the patient is scanned by CT and the CT data of the patient's spine is transmitted to the doctor's work platform;
[0061] 1-2) According to the spine CT data of the patient, segment the spine vertebra instance from the rest of the human body, and three-dimensionally reconstruct the segmented spine vertebra instance;
[0062] 1-3) The doctor picks up the target point under the image coordinate system and the robot coordinate system respectively, obtains the coordinate value of the target point, and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More