

Wrist and finger joint movement rehabilitation training robot
A joint exercise and rehabilitation training technology, applied in sports accessories, passive exercise equipment, gymnastics equipment, etc., can solve the sports training mode with poor quantitative degree, can not realize the combination of active and passive, can not effectively solve the torque adjustment range and linearity at the same time. To solve problems such as chemistry and so on, to achieve the effect of expanding the scope of action
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The present invention will be further described below in conjunction with the accompanying drawings.
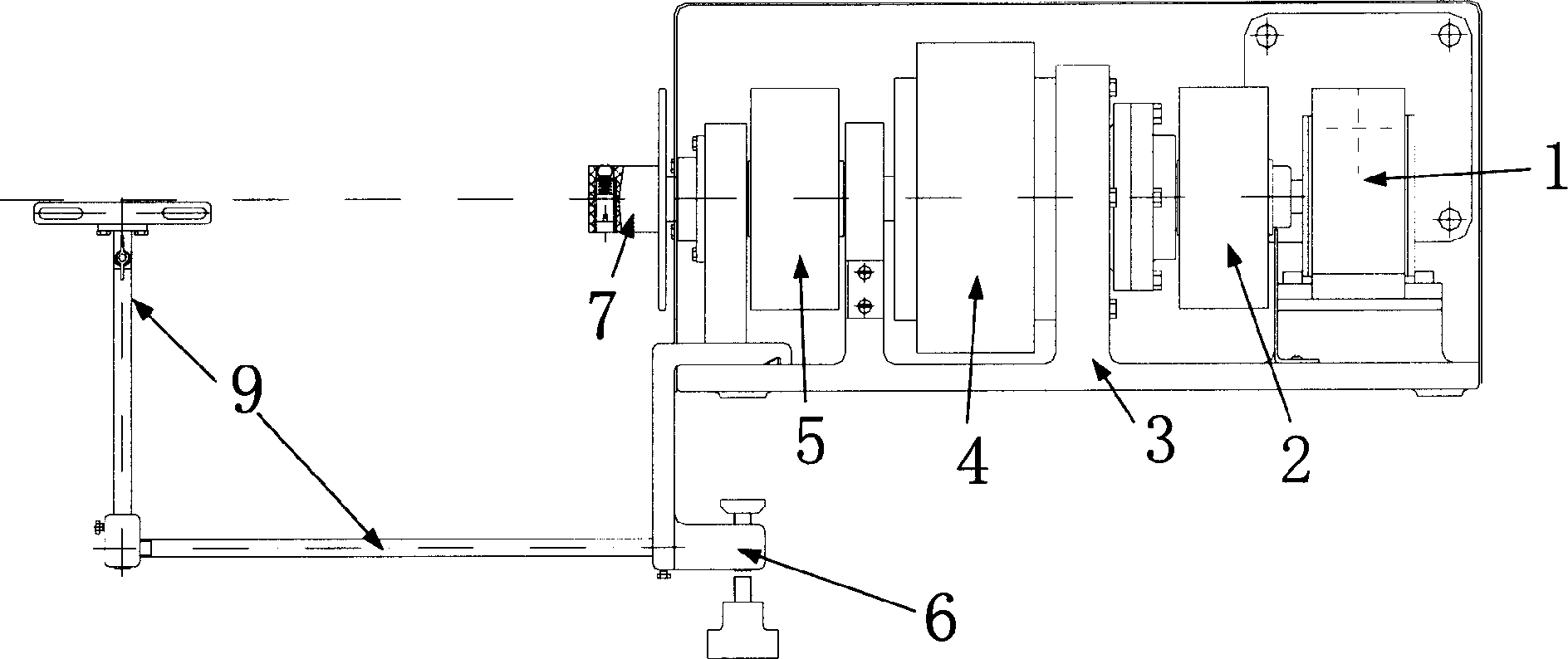
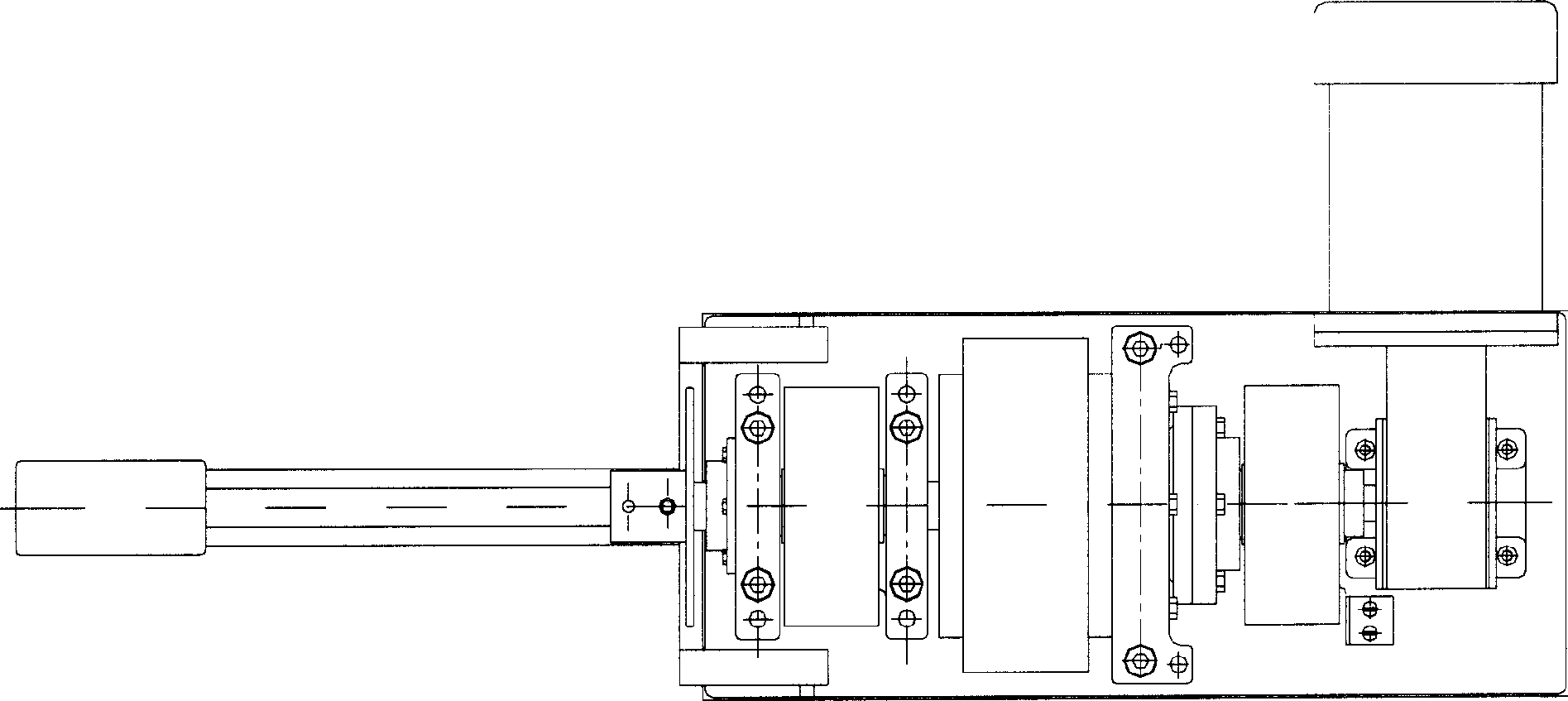
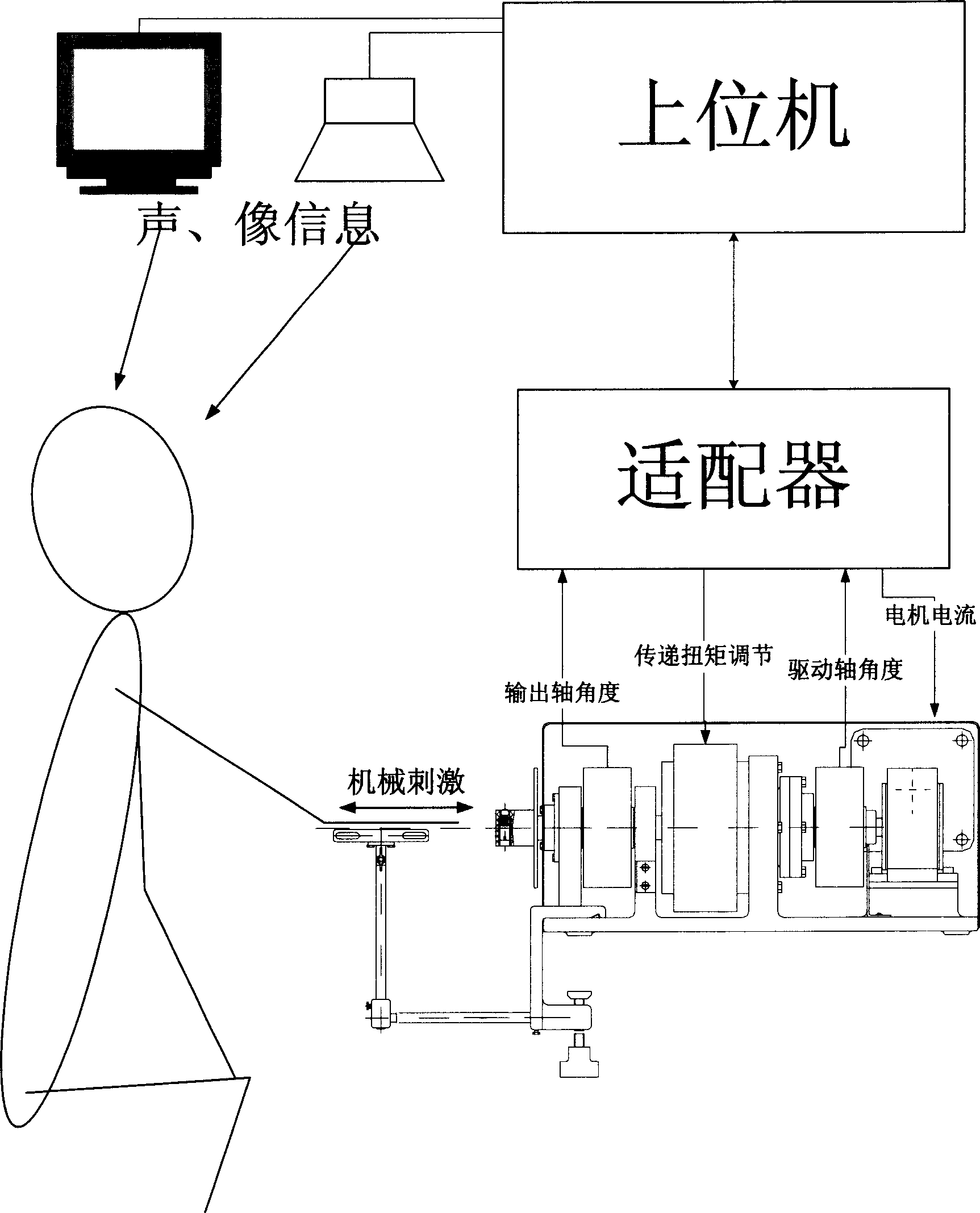
[0019] The wrist and finger joint motion rehabilitation training robot described in the present invention is provided with a host computer, and the host computer is respectively connected with the angle detection mechanism and the adjustable actuator arranged in the trainer box through an adapter; the robot is equipped with a set of Robot fixed jig, and a hand rest for supporting the wrist and palm installed on the fixed jig, the adjustable actuator includes a real-time output angle signal fixed on the base of the trainer box A speed-regulating drive device and a magnetic powder clutch, the input shaft of the magnetic powder clutch is rigidly connected with the output shaft of the speed-regulating drive device; the robot also includes a handle output shaft rigidly connected with the output shaft of the magnetic powder clutch, and is installed on the The handle output s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More