Bionic creeping device based on helminth creeping mechanism
A creeping and crawling mechanism technology, applied in the field of new crawling drive mechanism, can solve the problems of large volume, complex multi-degree-of-freedom motion control system, and heavy weight.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
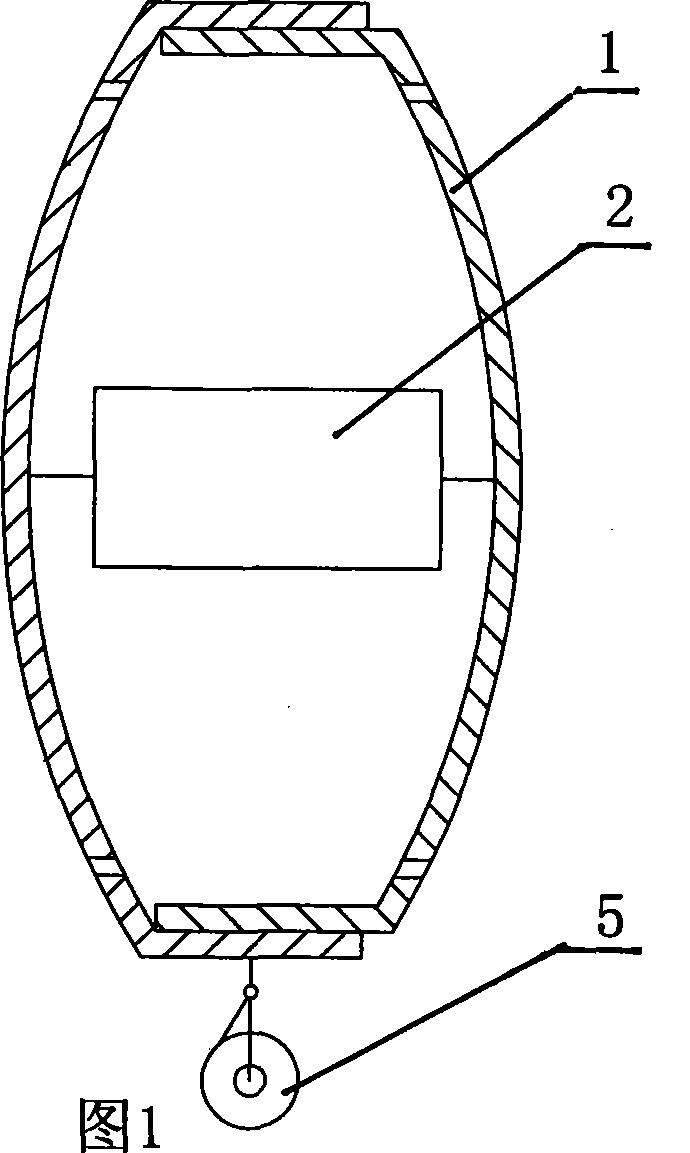
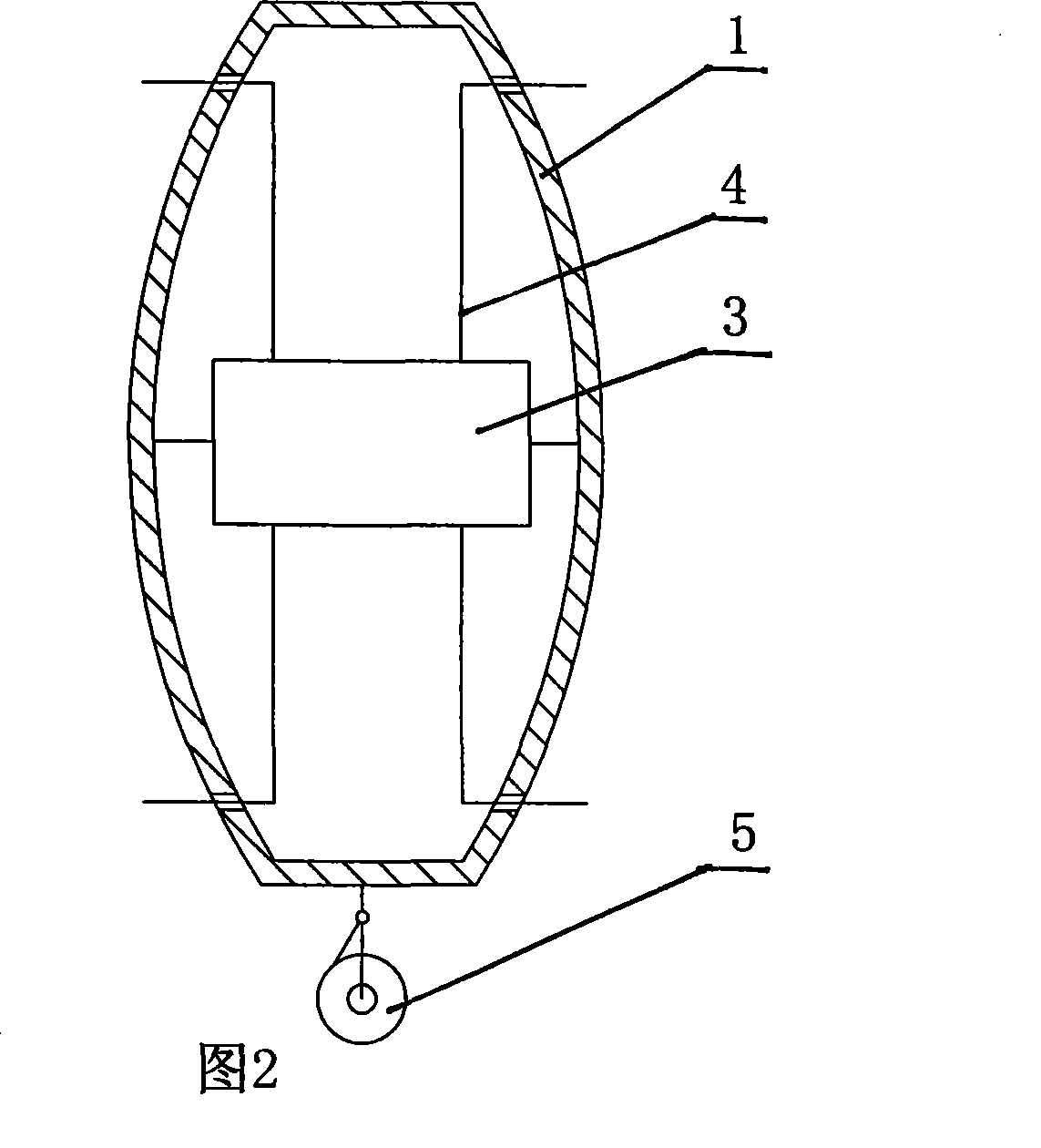
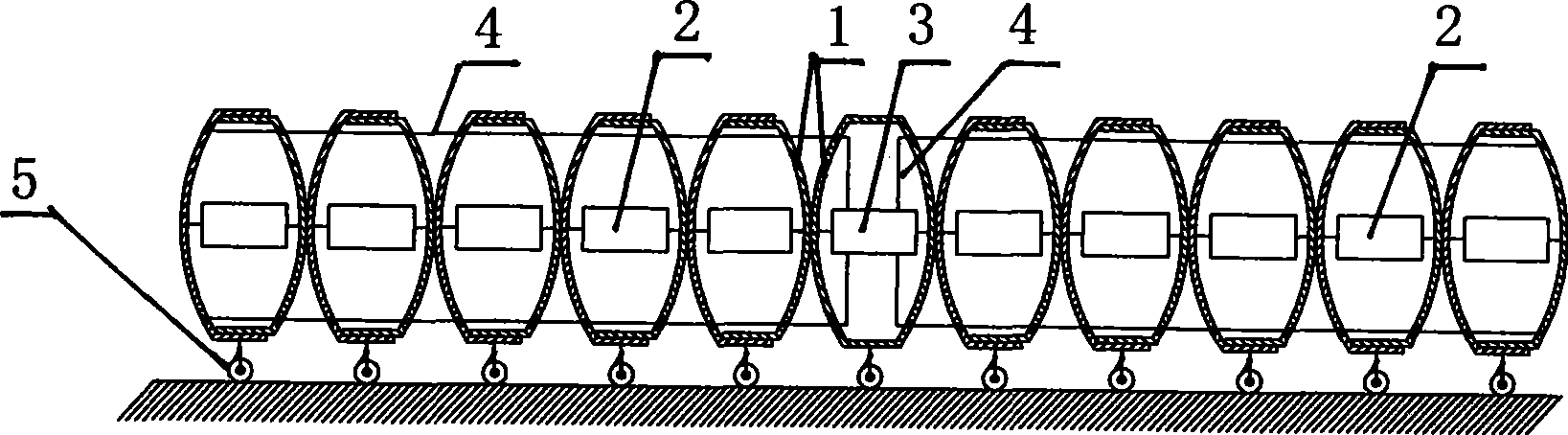
[0020] As shown in Figure 1 and Figure 2, the telescopic body segment and the control body segment of the bionic creeping crawling mechanism, the bionic creeping crawling mechanism is composed of several telescopic body segments and a control body segment, and the curved surface shell of each body segment is opened in the circumferential direction. There are 4 small holes evenly distributed, and the body segments are connected by elastic ropes. The telescopic body segment is composed of two equal-curvature curved shells, an expander and a one-way wheel. An expander is installed between the two curved shells, and the one-way wheel is installed and connected at the bottom of the telescopic body segment. The expansion and contraction of the expander causes the two curved shells to Relative motion occurs. The control body segment is composed of two curved shells, a controller, an elastic rope and a one-way wheel. The controller is installed between the two curved shells, the contr...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap