

Minimally invasive surgical wire driving and four-freedom surgical tool
A technology of minimally invasive surgery and surgical tools, applied in the directions of surgery, surgical saws, surgical instruments, etc., can solve the problems of increasing the friction of wire transmission, deteriorating the force of the tool, affecting the precision of wire transmission, etc. Optimum strength and reduced trauma effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The minimally invasive surgical wire drive and four-degree-of-freedom surgical tool of the present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
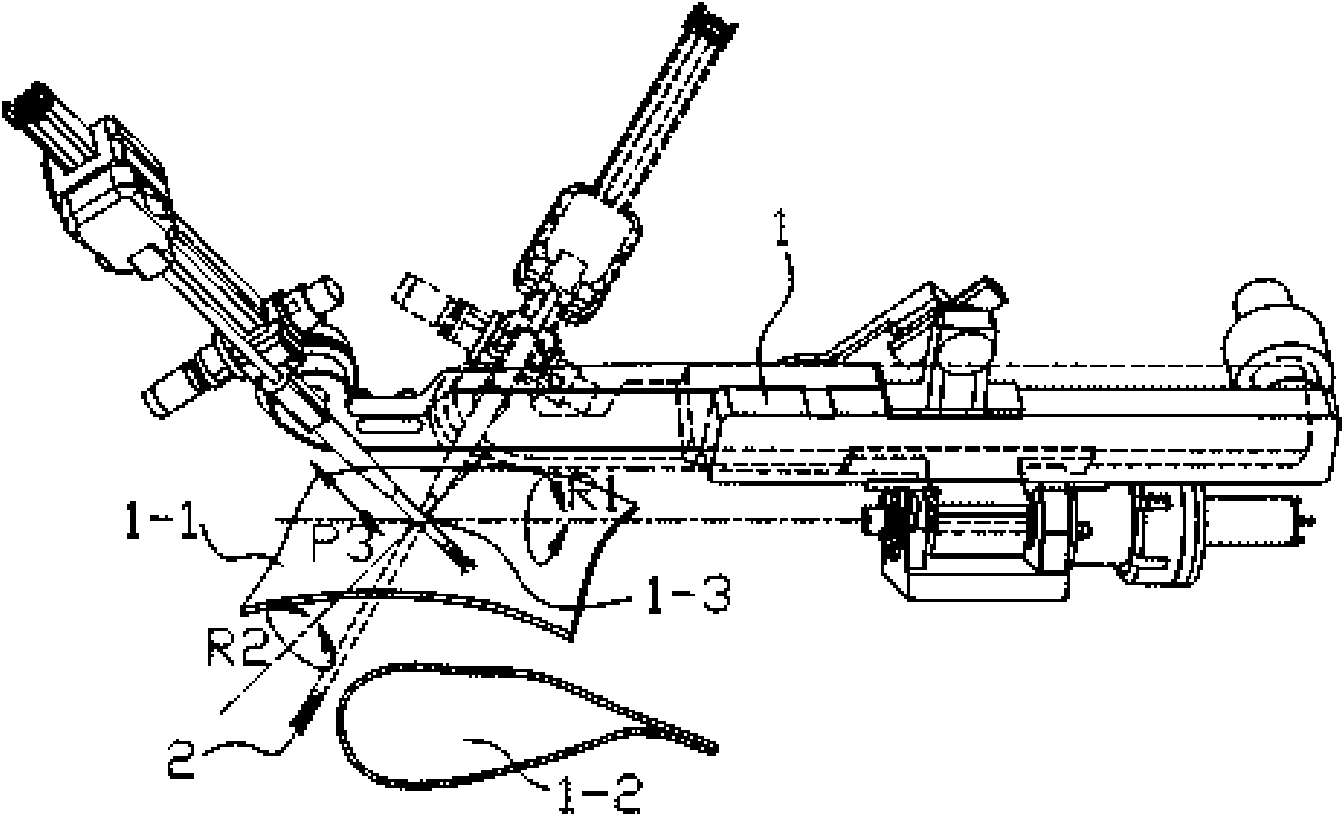
[0033] Such as figure 1 Shown: Surgical tools perform surgical operations with the assistance of the minimally invasive surgery body system 1. The body system has three degrees of freedom of motion, which are two rotations R1, R2 and one degree of freedom of movement P1, and the three degrees of freedom of movement The axes intersect at point 1-3, which is fixed relative to the base of the body system for all modes of motion of the body system. During actual operation, this fixed point is the surgical tool penetration point 1-3 on the human epidermis 1-1. The two rotations and one movement around the tool penetration point of the body system are responsible for the adjustment of the position of the surgical tool rod installed on the body system in a wide r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More