

Biological antenna model-based multi-robot underwater target searching method and device
A multi-robot, underwater target technology, applied in the field of multi-robot target search, can solve the problems that affect the efficiency of robot path planning, increase the requirements for autonomous obstacle avoidance of robots, and cannot accurately complete the construction of underwater environment maps, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0077] The present invention will be further described in detail below in conjunction with the accompanying drawings.
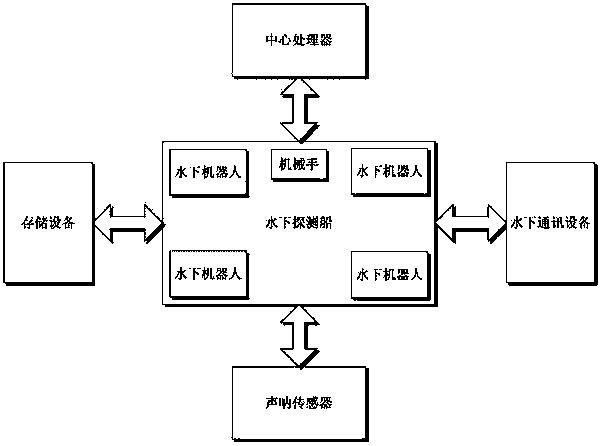
[0078] Implement a kind of hardware device composition block diagram of the present invention as figure 1 As shown, it includes an underwater detection vessel and four underwater robots, among which four underwater robots are mounted on the four edges of the underwater detection vessel, and both the underwater detection vessel and the underwater robots are equipped with underwater communication equipment , a central processing unit, a storage device, a sonar sensor, and a manipulator at the front end of the underwater detection ship. The underwater robot detects the real-time information of the environment through the sonar sensor, and uses the underwater communication equipment to send the environmental information to the underwater detection ship. The underwater detection ship receives the information and completes the construction of the grid map on the ce...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More