

Unmanned aerial vehicle mobile platform landing method and system based on rotating frame detection and positioning
A mobile platform, UAV technology, applied in three-dimensional position/channel control, attitude control and other directions, can solve the problems of inability to obtain the accurate position of the ground mobile platform, landing failure, etc., to achieve good fit, good coverage, improve The effect of efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0056] In order to enable those skilled in the art to better understand the solutions of the present invention, exemplary implementations or embodiments of the present invention will be described below in conjunction with the accompanying drawings. Apparently, the described embodiments or examples are only part of the embodiments or embodiments of the present invention, not all of them. Based on the implementation modes or examples in the present invention, all other implementation modes or examples obtained by persons of ordinary skill in the art without creative efforts shall fall within the protection scope of the present invention.
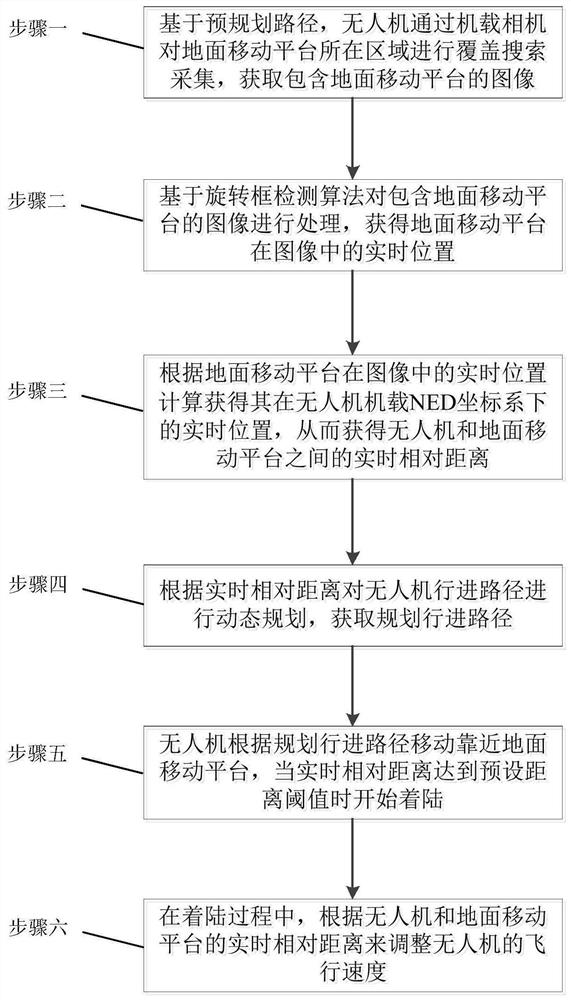
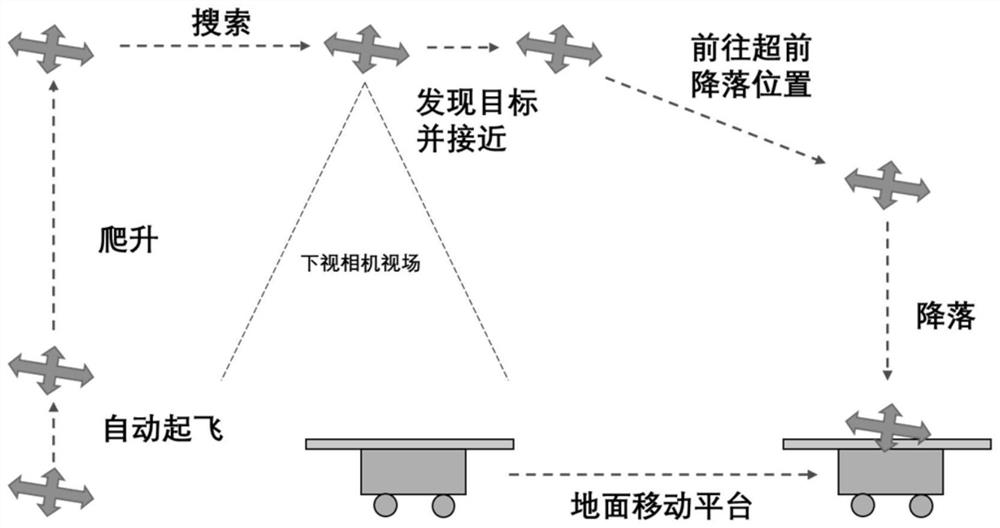
[0057] An embodiment of the present invention provides a method for landing a UAV mobile platform based on rotating frame detection and positioning, such as figure 1 As shown, the method includes the following steps:
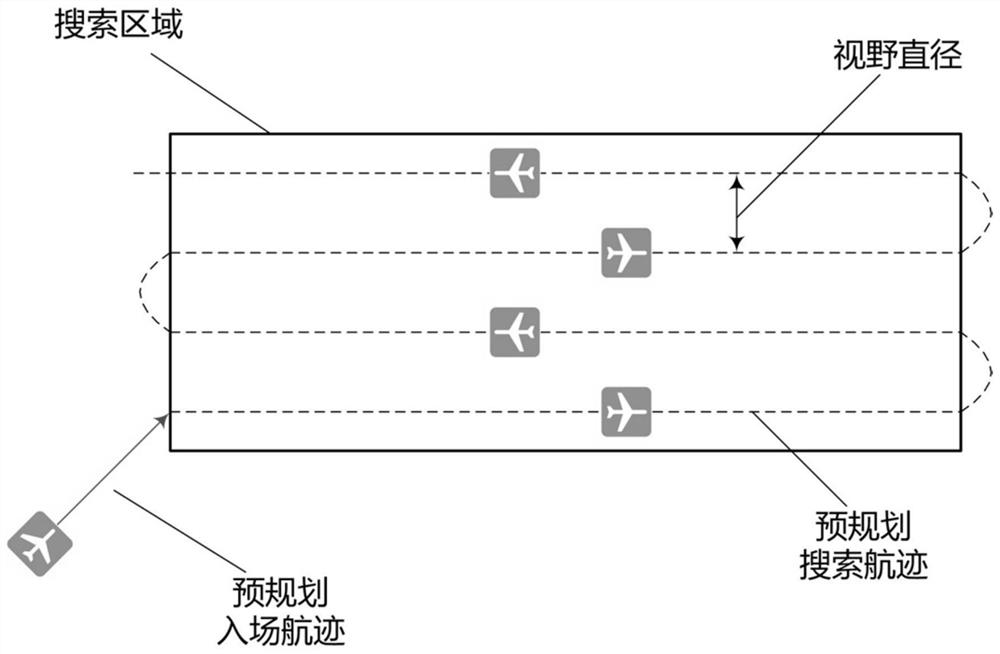
[0058] Step 1. Based on the pre-planned path, the UAV uses the airborne camera to perform coverage search and collection on t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More