

Unmanned aerial vehicle accurate landing method integrating H pattern recognition and AprilTag two-dimensional code recognition
A technology of drones and two-dimensional codes, applied in character and pattern recognition, computer parts, instruments, etc., can solve problems such as signal loss, landing at the wrong place, and error increase, so as to improve accuracy, reduce burden, Guaranteed high-precision results
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
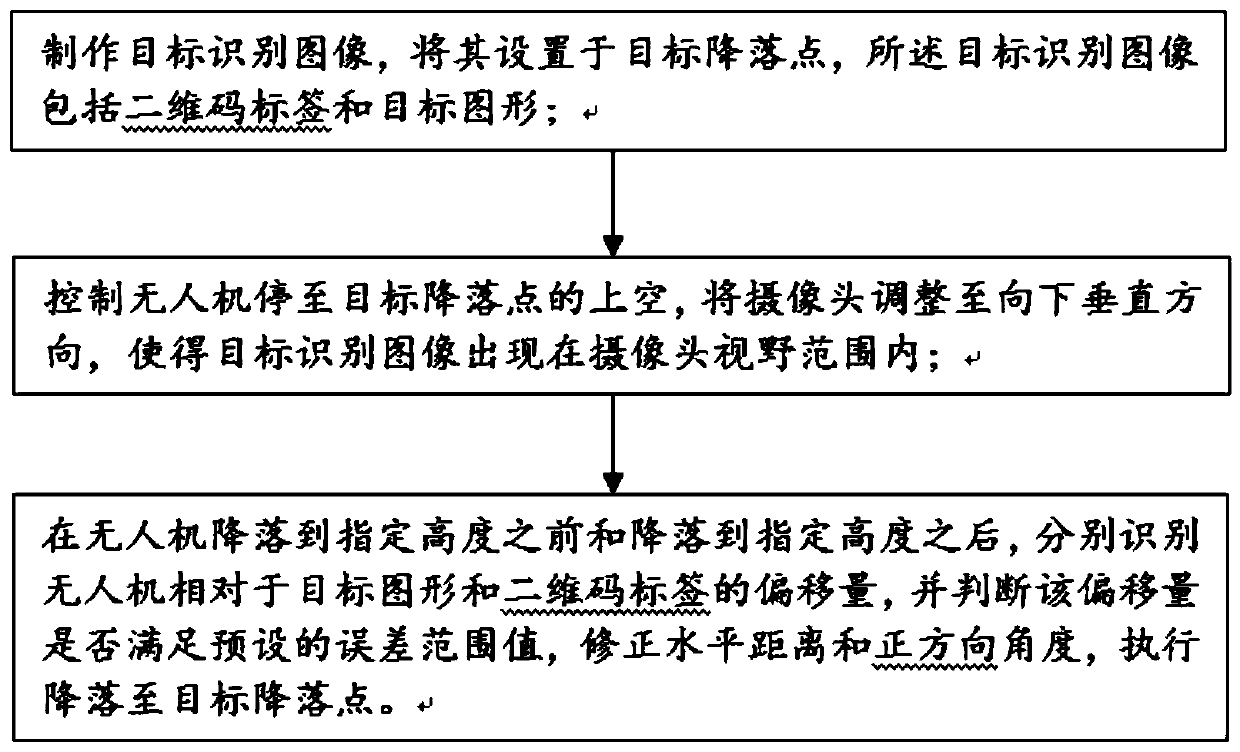
[0041] Such as figure 1 As shown, the present disclosure provides a method for precise landing of UAVs that integrates H pattern recognition and AprilTag two-dimensional code recognition, including:
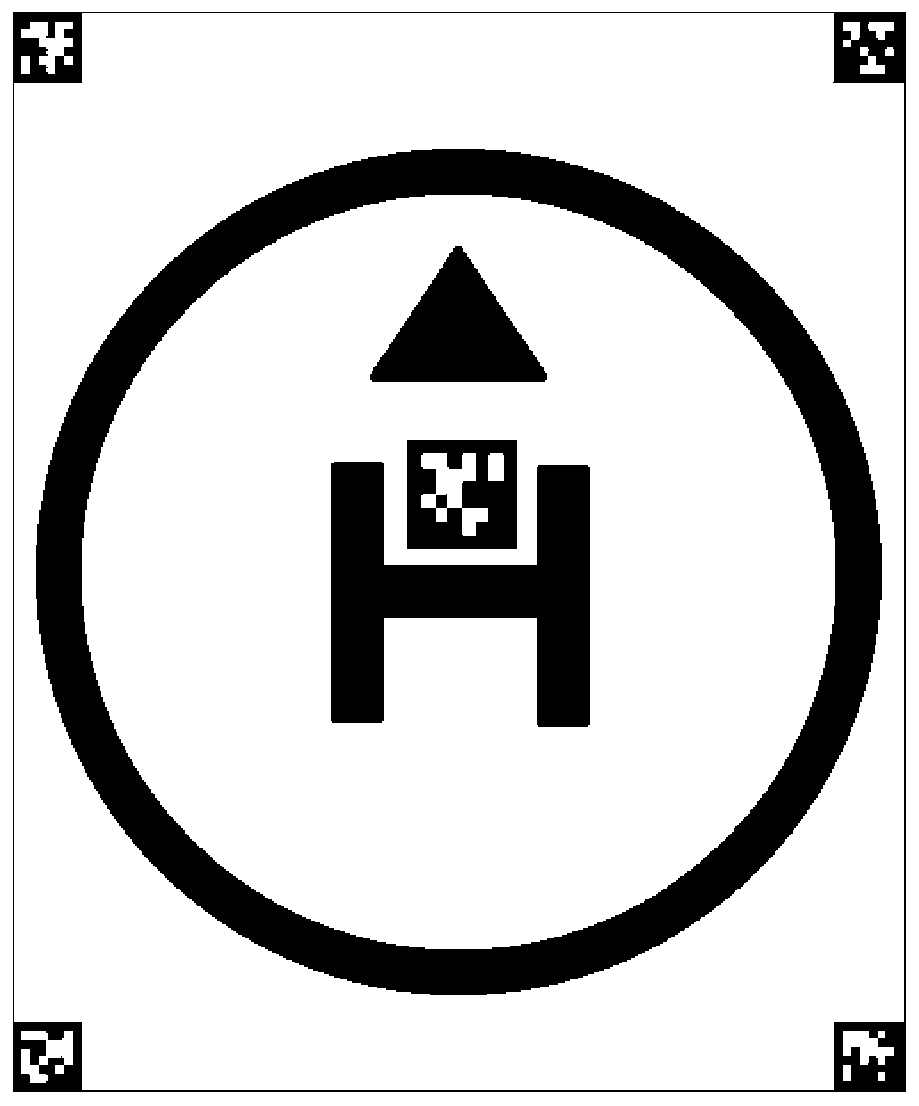
[0042] Step 1: Make a target recognition image, and set it at the target landing point, that is, in the apron; the target recognition image includes a two-dimensional code label and a target graphic;
[0043] The target recognition image is composed of the outermost circle, triangle, "H" and five two-dimensional code labels. The pattern is black with a bright yellow background;
[0044] Among them, the "H" mark is located in the very center of the image, and the top of the "H" mark is a triangle. The side marked with the triangle corresponds to the front of the drone, and the other side corresponds to the rear of the drone. The side corresponds to the two sides of the landing legs of the drone; the color of the apron is not unique, try to choose a color with a strong contrast, ...
Embodiment 2
[0073] The present disclosure provides a UAV precision landing system that integrates H pattern recognition and AprilTag two-dimensional code recognition, including,
[0074] An image drawing module, which is used to make a target recognition image, and the target recognition image includes a two-dimensional code label and a target graphic;
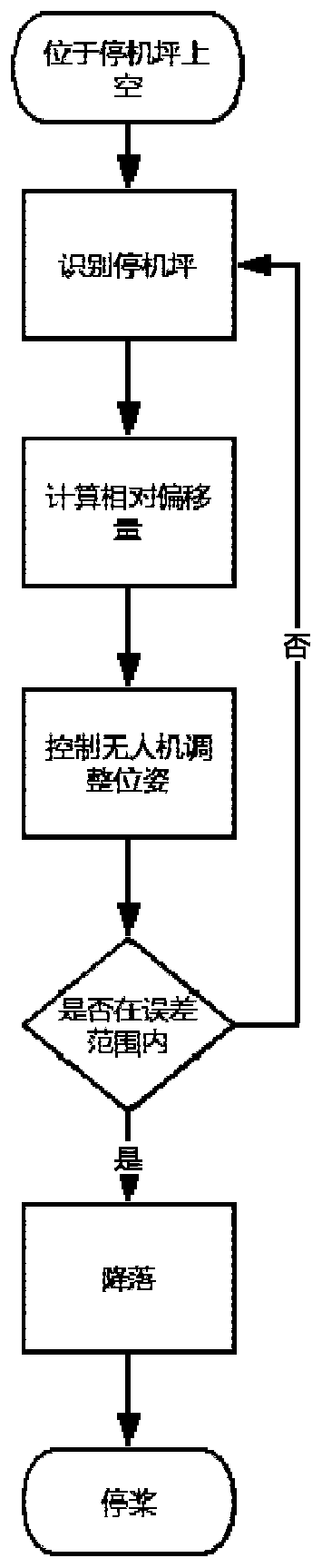
[0075] A control module, which is used to control the UAV to stop over the target landing point, and adjust the camera to a downward vertical direction, so that the target recognition image appears within the camera field of view;
[0076] The identification and adjustment module is used to identify the offset of the drone relative to the target graphic and the two-dimensional code label before and after the drone lands at the specified height, and determine whether the offset is Satisfy the preset error range value, adjust the horizontal distance and positive direction angle, and perform landing to the target landing point.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More