

Unmanned aerial vehicle accurate landing control system and method based on dynamic two-dimensional code
A dynamic two-dimensional code, drone technology, applied in control/regulation systems, non-electric variable control, altitude or depth control, etc. The human-machine can not see the complete pattern and other problems, to achieve the effect of increasing accuracy and safety, safe and reliable landing, and accurate position
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0039] Embodiment 1, this embodiment provides an interactive precision landing system for UAVs based on a dynamic two-dimensional code;
[0040] Interactive precision landing system for drones based on dynamic QR codes, including: drones and base stations;
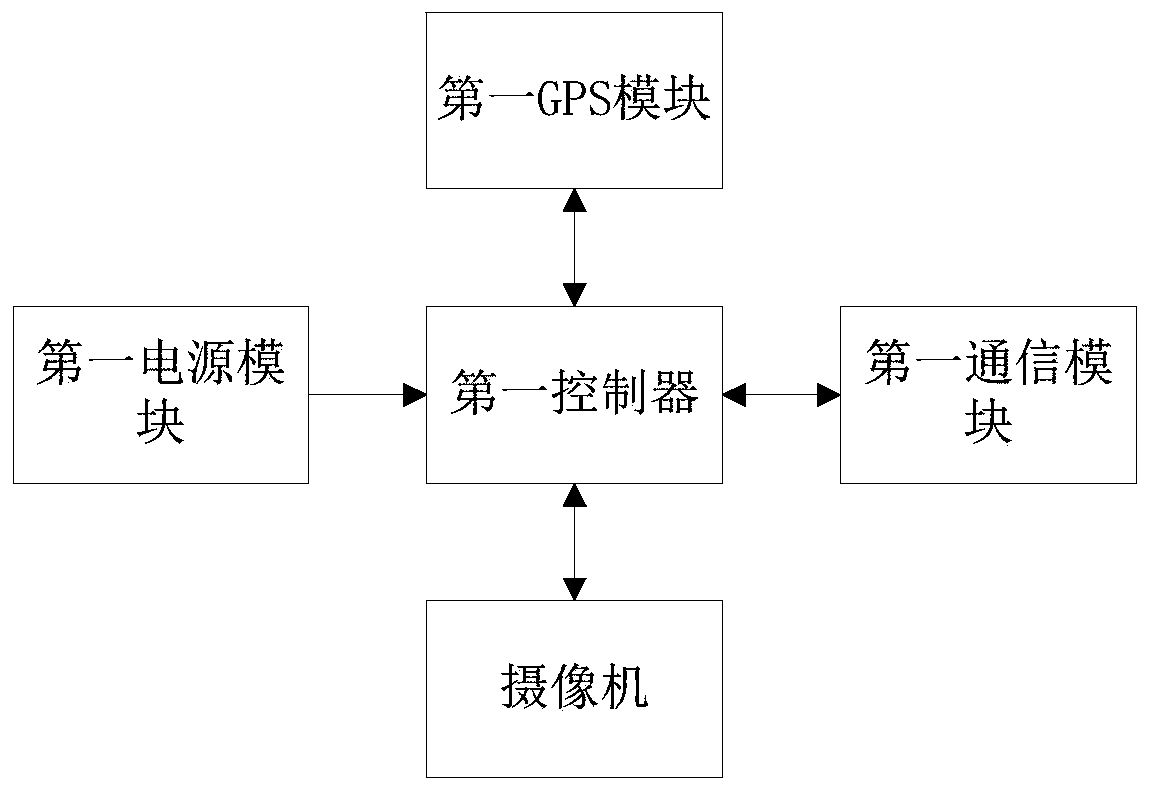
[0041] The unmanned aerial vehicle includes: a first controller, and the first controller is respectively connected with the camera, the first GPS module, the first communication module and the first power supply module;
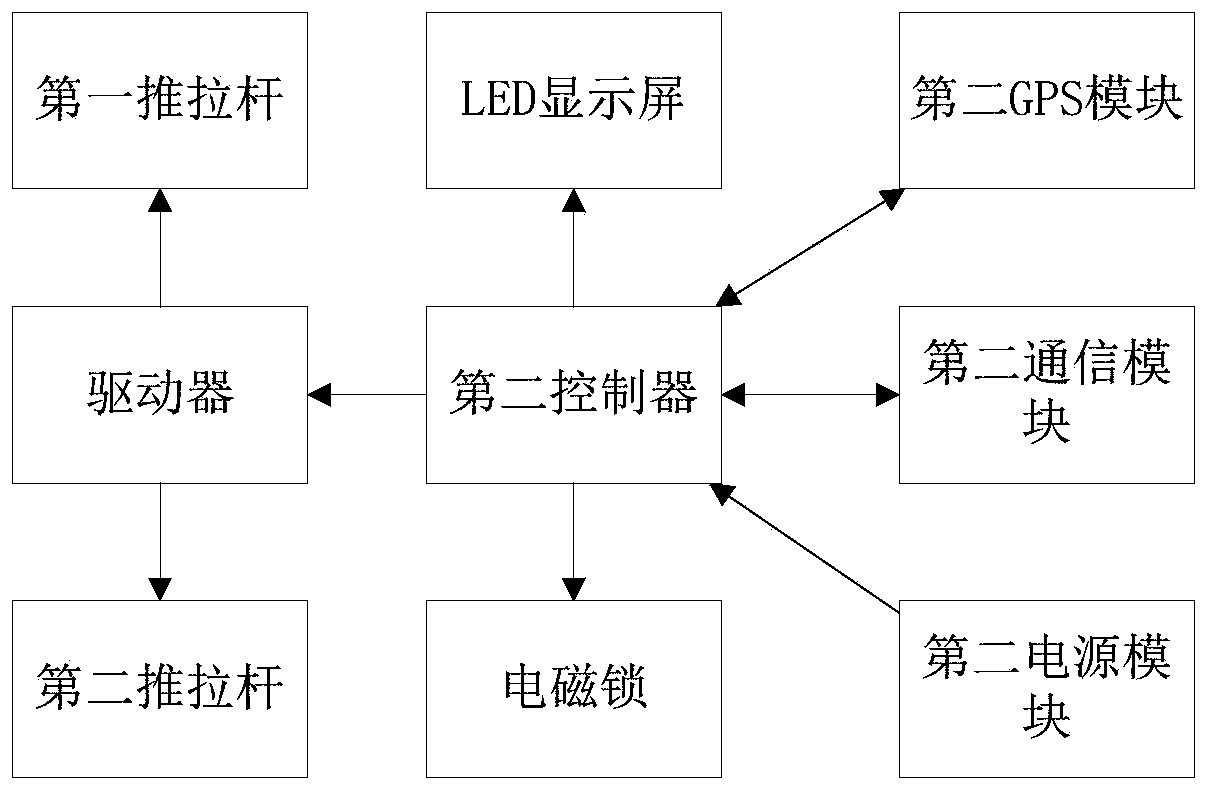
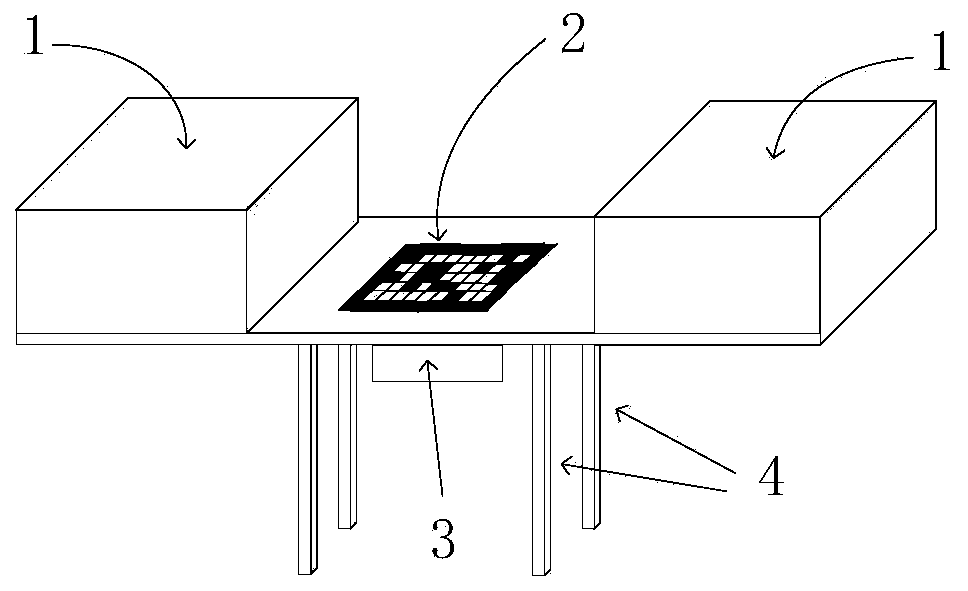
[0042] The base station includes: a shutdown box, a second controller is arranged in the shutdown box, and the second controller is connected with the LED display screen, the second GPS module, the second communication module, the second power supply module, and the electromagnetic lock respectively. It is connected with the driver, and the driver is connected with two push-pull rods, and the driver is used to open or close the shutdown box for the drone;
[0043] The first GPS module collects the curre...
Embodiment 2
[0062] Embodiment 2. This embodiment provides an interactive precise landing method for UAVs based on dynamic two-dimensional codes;
[0063] Such as Figure 7 As shown, the UAV interactive precision landing method based on the dynamic two-dimensional code includes:
[0064] The base station adjusts the display quantity and display size of the two-dimensional code according to the current location information of the drone received, and guides the drone to land on the apron smoothly.
[0065] An interactive precise landing method for UAVs based on dynamic two-dimensional codes, the specific steps include:
[0066] S100: The UAV sets its own route according to the GPS location information provided by the base station, and the UAV flies to the sky above the parking box according to the set route;
[0067] S200: According to the GPS location information provided by the base station and the GPS location information collected by itself, the UAV judges whether the UAV is located di...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More