

Police service multi-unmanned aerial vehicle target searching method based on normal distribution probability graph
A multi-drone, normal distribution technology, applied in the field of target search, can solve problems such as low search efficiency and failure to search for targets, and achieve the effects of improving search efficiency, scientific generalization ability, and improving efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach
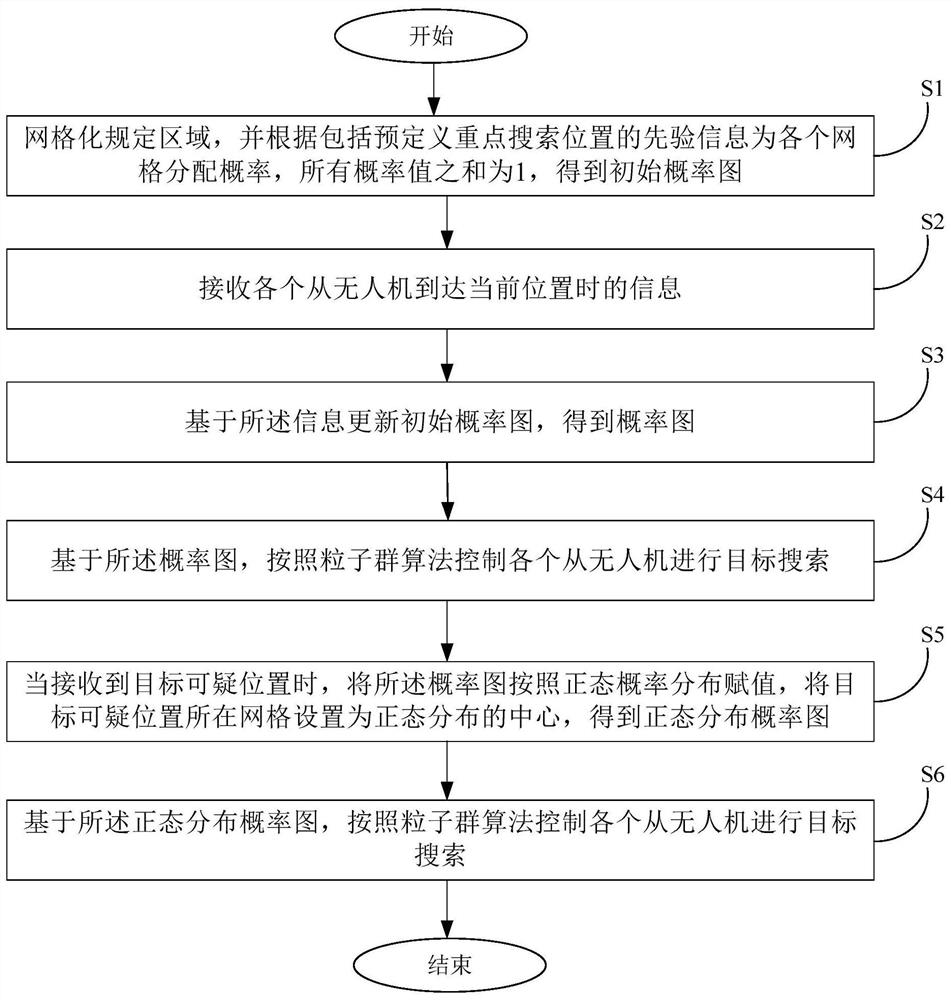
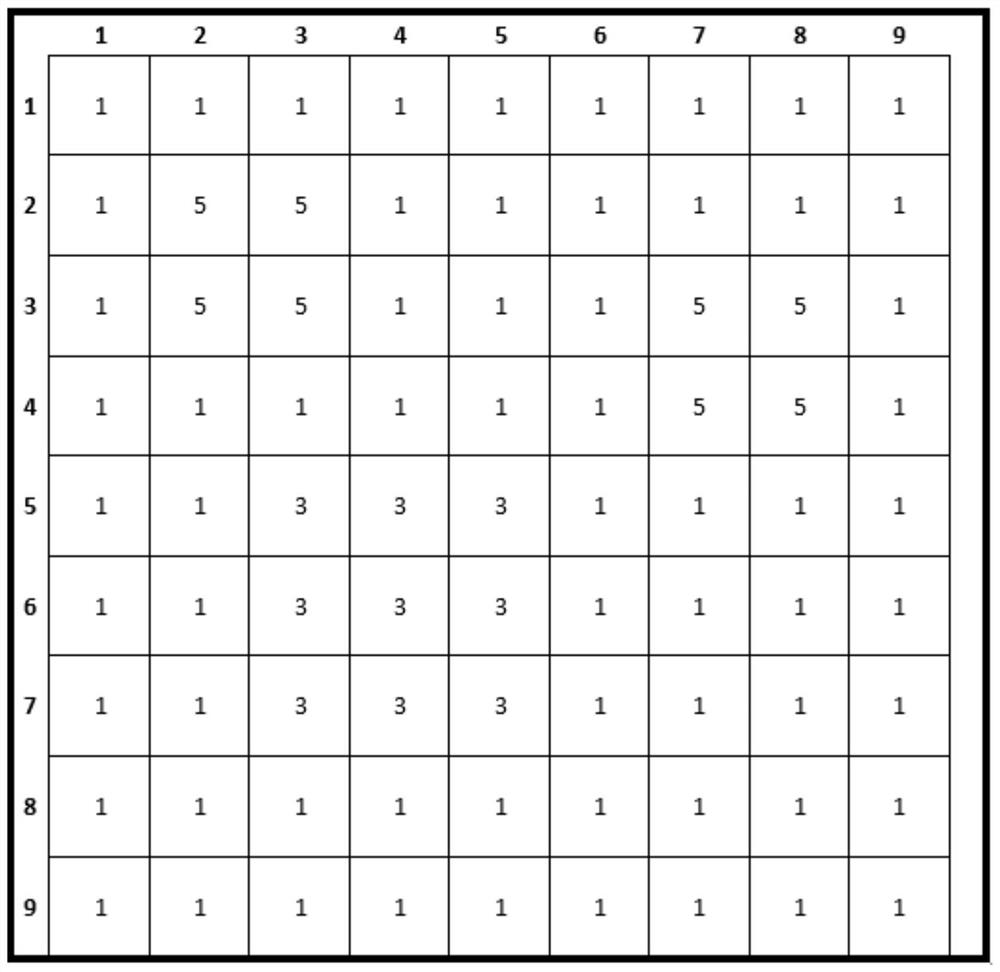
[0087] The first way:
[0088] Calculate the probability values of each grid in turn according to the joint probability density formula of normal distribution; among them, the joint probability density formula of normal distribution is as follows:
[0089] Among them, x and y are the abscissa and ordinate of the grid respectively, μ x and μ y is the grid coordinate (x, y) of the suspicious position of the target, σ x and σ y take 2;
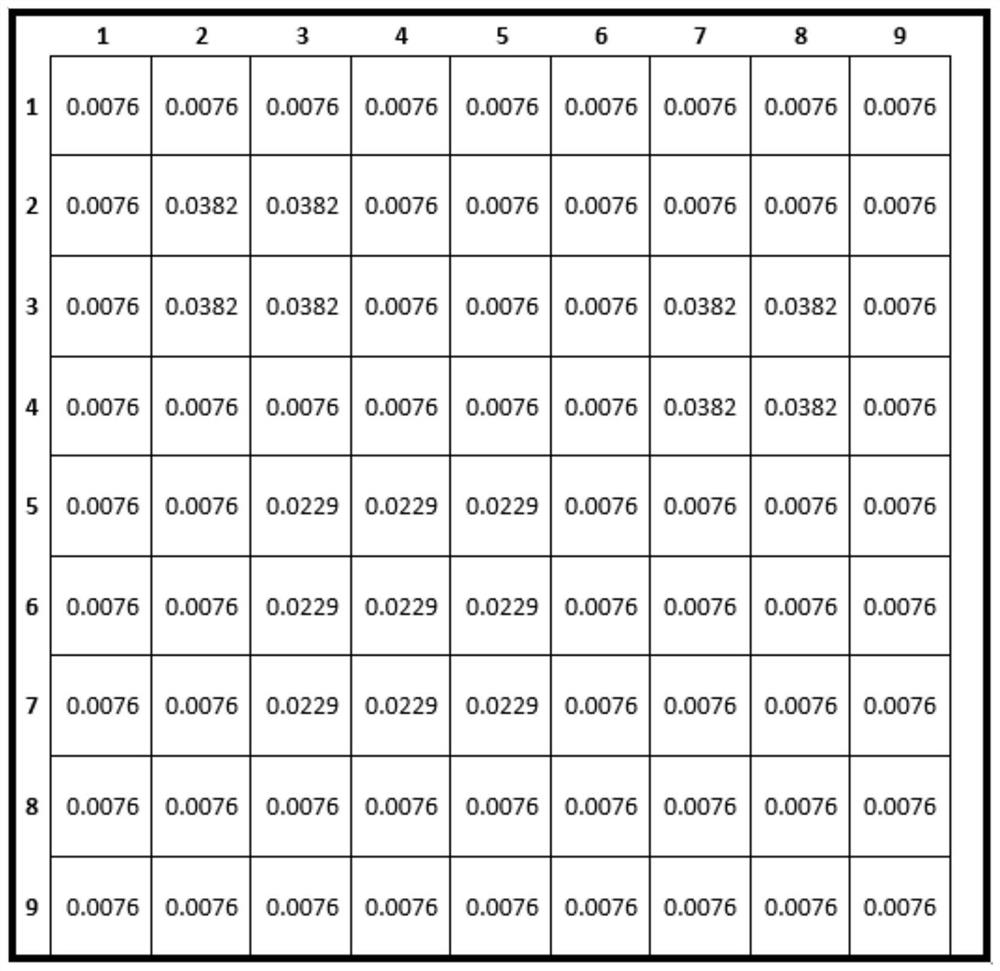
[0090] For example, when a suspected target suspect is found in the grid (5, 5), the center position of the normal distribution is selected as (5, 5), μ x and μ y The value is 5,
[0091] P * (1,1)=1 / 8π*exp{-1 / 2(4+4)}=0.0007;
[0092] P * (1,2) = 0.0017;
[0093] P * (5,5)=1 / 8π=0.0398;
[0094] The probability values of each grid are calculated in turn, and the obtained normal distribution probability map is as follows: Figure 5 shown;
[0095] Then calculate the sum of all grid probabilities P t ; via P k (i,j)=P * k (i,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More