

A method of real-time message transmission among multi-robots
A real-time message and robot technology, applied in transmission systems, digital transmission systems, electrical components, etc., can solve problems such as no public network real-time message transmission results or mature technical solutions, and inability to set quality of service parameters
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach
[0087] Adopt the specific embodiment of the present invention as follows:
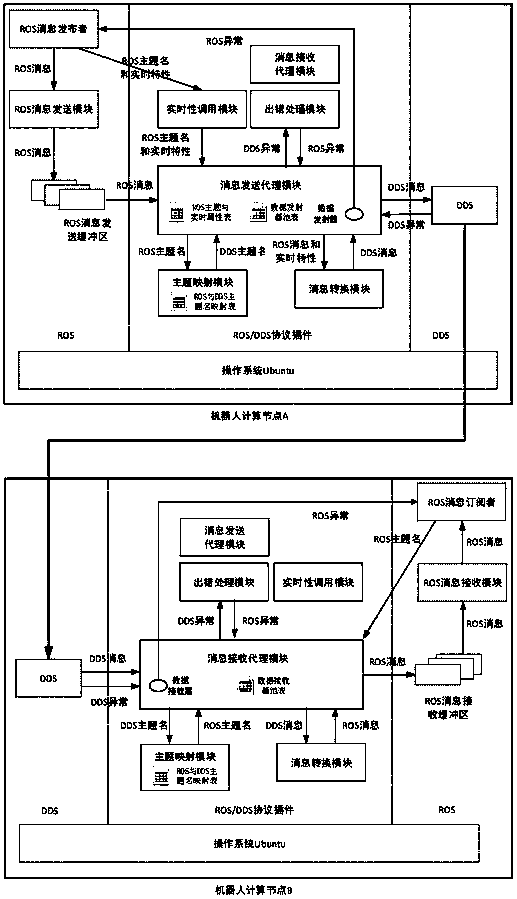
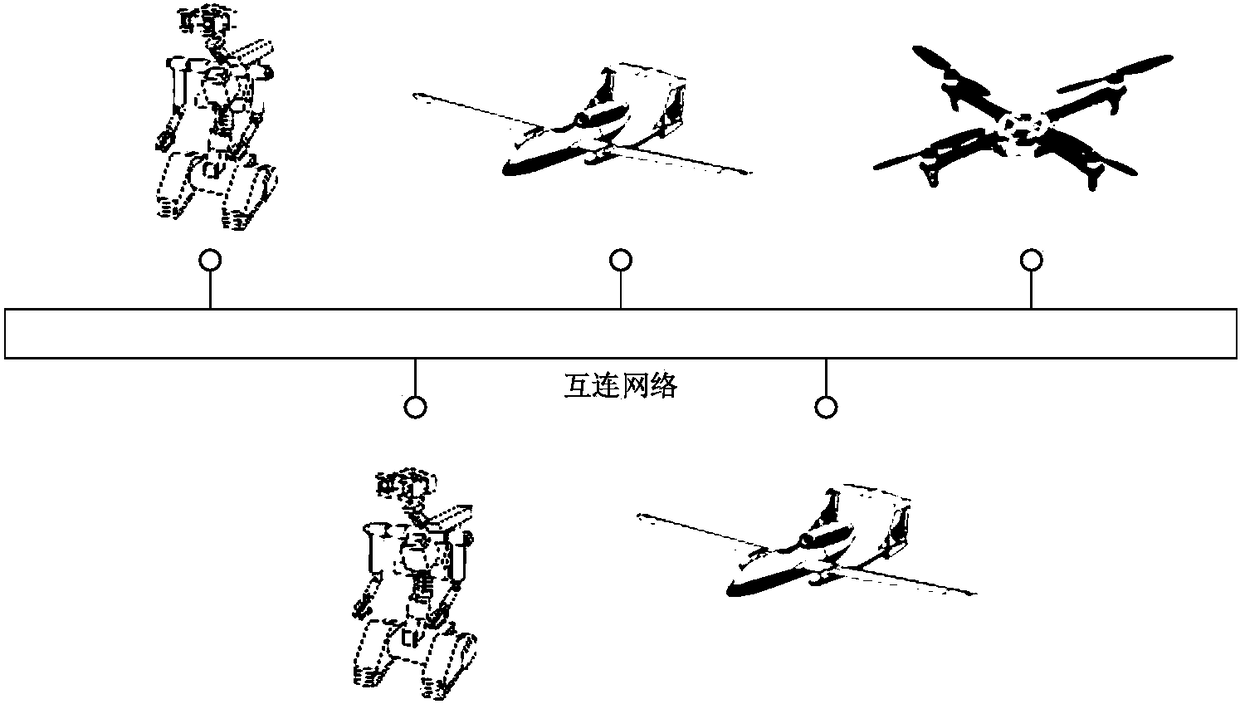
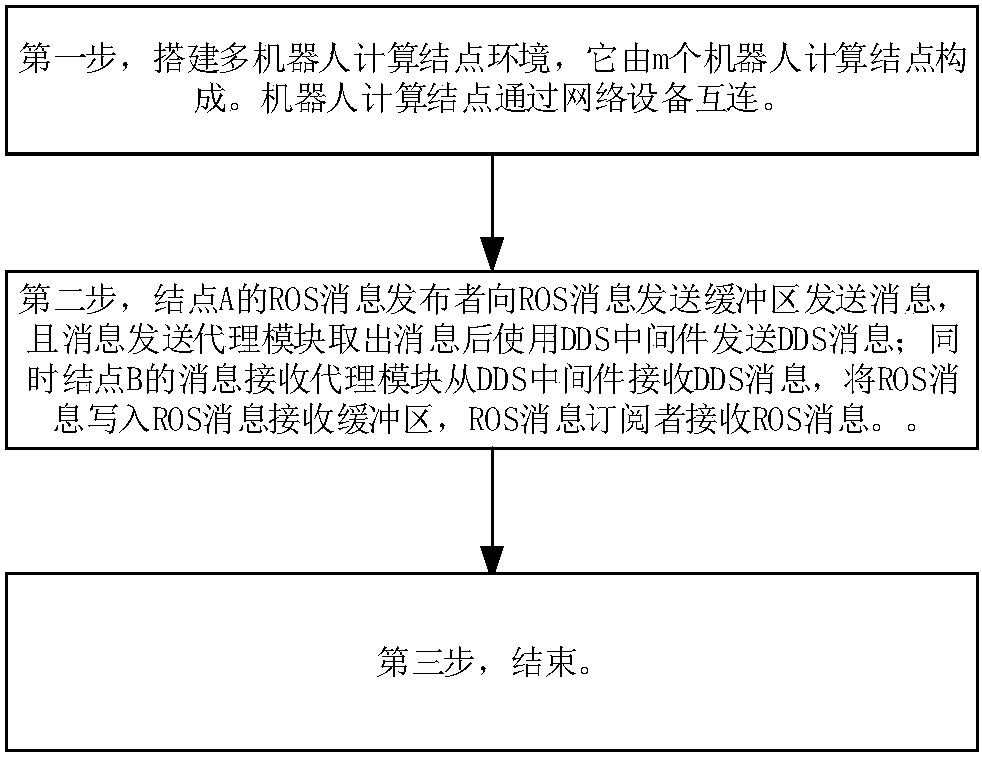
[0088] The first step is to build a simple UAV system, which consists of two computing nodes, a UAV and a ground control station, which are interconnected through network devices. (combined figure 1 ) UAV is equipped with operating system Ubuntu, robot middleware ROS, message real-time middleware conforming to DDS specification, ROS / DDS protocol plug-in and message publishing program. The ground control station is equipped with operating system Ubuntu, robot middleware ROS, message real-time middleware conforming to DDS specification, ROS / DDS protocol plug-in and message subscription program.
[0089] In the second step, the message publishing program on the UAV sends the flight status data and image information collected by the UAV, and the message subscription program of the ground control station receives the flight status data and image information sent by the UAV.
[0090] 2.1.1 The message publ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More