

Six-degree-of-freedom space manipulator ground microgravity equivalent experimental device and experimental method
A technology of space manipulators and experimental devices, applied in the direction of educational appliances, instruments, teaching models, etc., can solve the problems of less degrees of freedom and large interference, and achieve the effect of improving equivalence and low interference
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
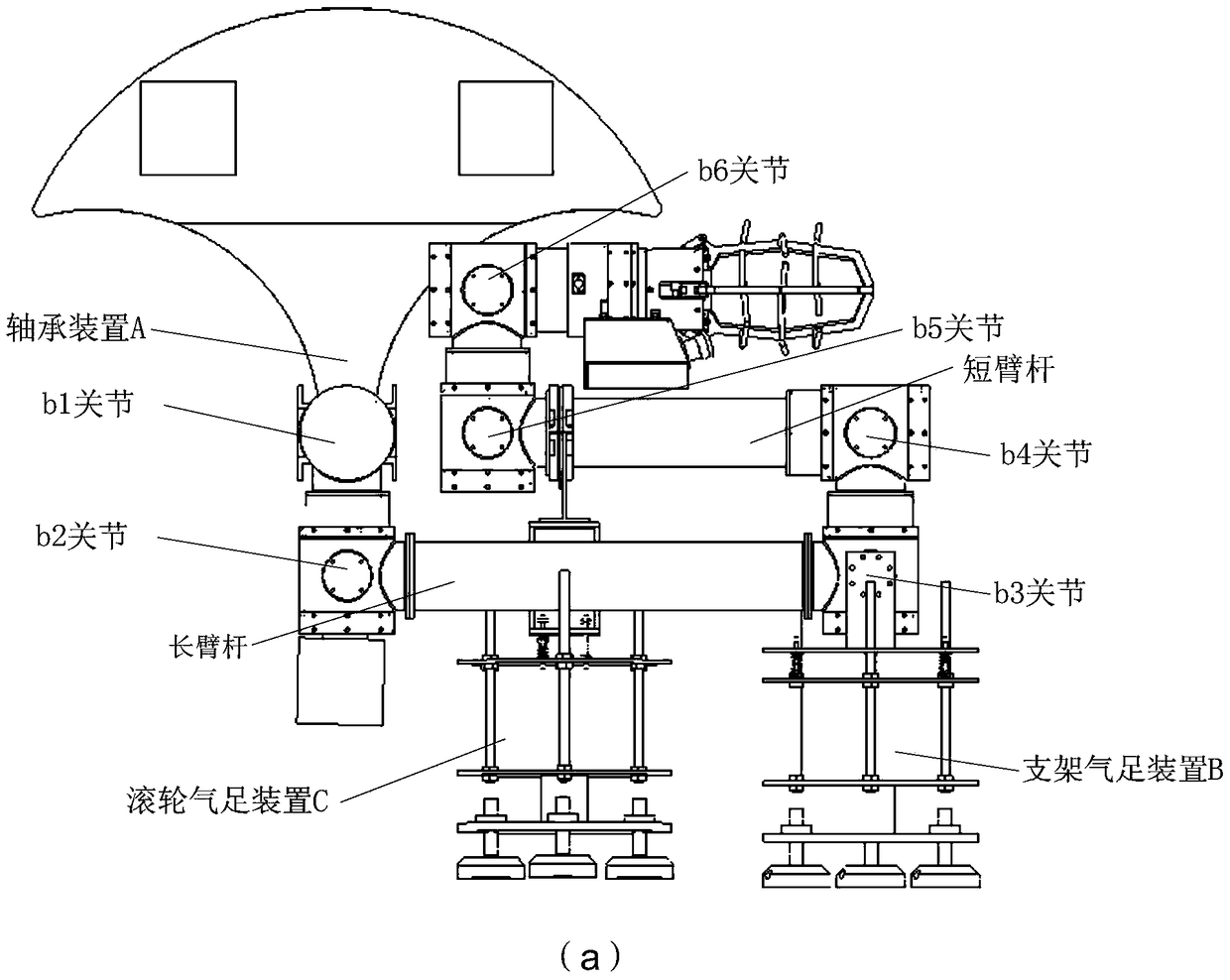
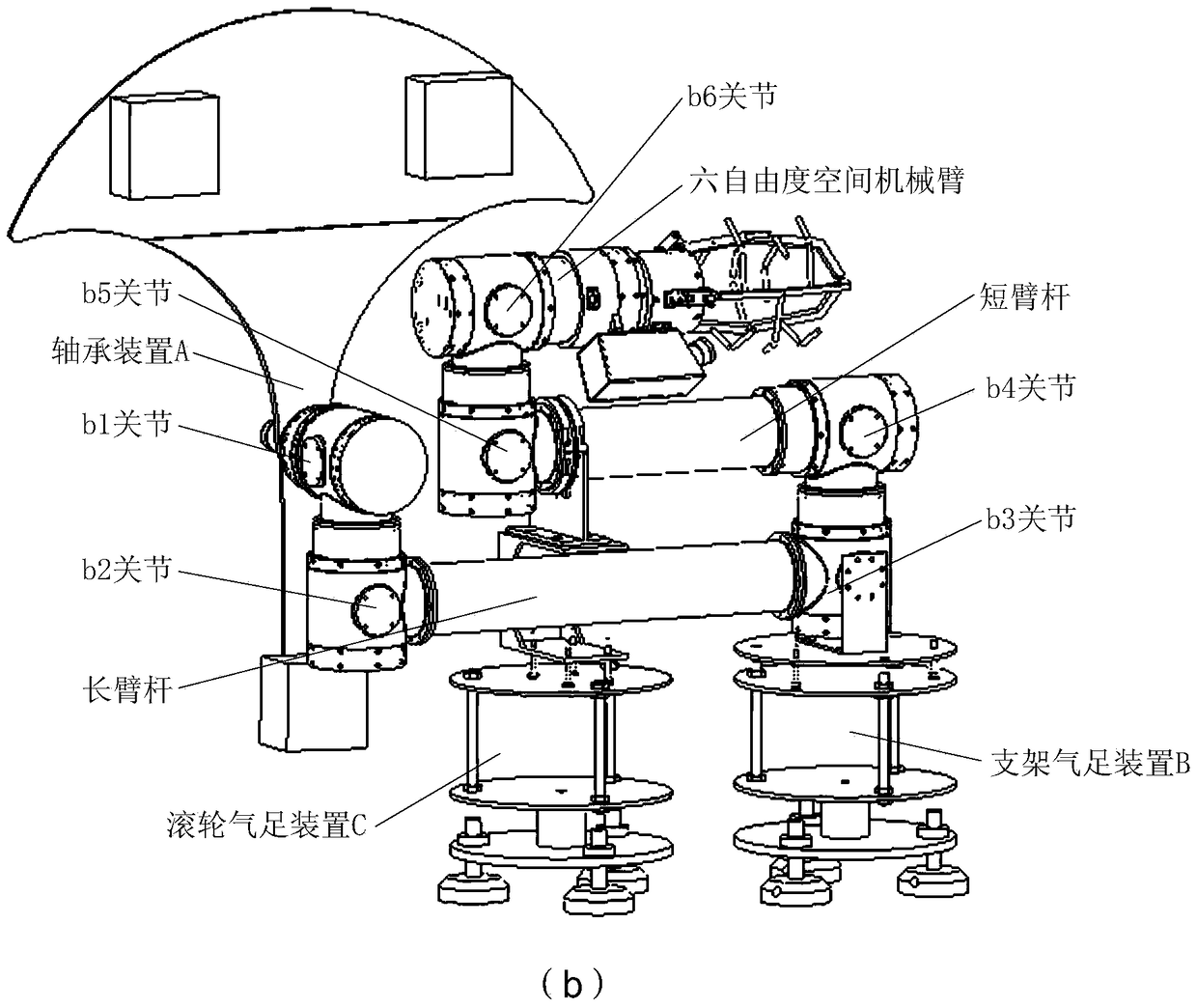
[0037] like figure 1 As shown, each joint of the space manipulator is marked as b1 joint, b2 joint, b3 joint, b4 joint, b5 joint and b6 joint. The traditional hanging wire device can realize the movement of multiple degrees of freedom, but the interference force is very large; The air flotation device has little interference, but it only supports the movement of the two degrees of freedom of the b2 joint and b3 joint of the space manipulator. Among them, (a) is the main view, and (b) is the perspective view.
[0038] The present invention proposes a six-degree-of-freedom space manipulator ground microgravity equivalent experimental device, including a bearing device A, a support air foot device B and a roller air foot device C;
[0039] like figure 2 As shown, the bearing device A includes a bearing assembly 1, a simulated satellite load mounting plate 2 and a counterweight 3. The bearing assembly includes a bearing seat 11, a bearing 12 located on the bearing seat and a ro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More