

Under-actuated release control method based on nonlinear space tether system
A space tether and release control technology, applied in non-electric variable control, vehicle position/route/height control, attitude control, etc., can solve the problem of insufficient perturbation factors, time-consuming calculation, and lack of global stability in radial release control gender analysis
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
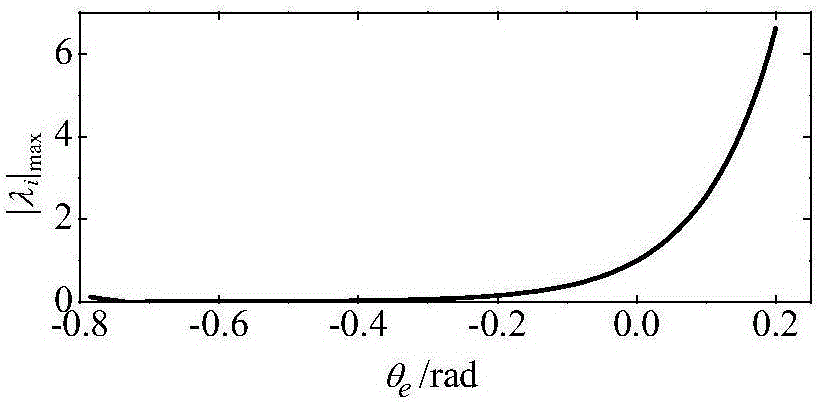
[0092] The parameters are selected to numerically verify the stability of the release control process of the tethered satellite system. Let the true anomaly angle v at the initial moment of the system be 0 = 0, dimensionless tether length ξ 0 =0.01, and the eccentricity of the Kepler orbit e=0.05, the stability of the system near the equilibrium point can be determined based on the Floquet theory.
[0093] Study the desired out-of-plane roll angle φ e = 0 where the equilibrium point (θ e ,0,φ e ,0), according to the expression (11) of the value range of the expected in-plane pitch angle, we can get θ e ∈[-π / 4,-0.0334). Numerical simulation can obtain the relationship between the maximum eigenvalue modulus of the single-valued matrix of the system within the definition domain and the pitch angle in the expected plane, as shown in image 3 shown. It can be seen from the figure that for φ e =0, when the desired pitch angle θ e ∈[-π / 4,-0.0334), there is |λ i | max e ∈[-...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More