

Automatic spraying system and method based on point cloud and image matching
An automatic spraying and point cloud technology, applied in spraying devices and other directions, can solve the problems such as the need to improve the customization technology of the production process, the time-consuming and laborious construction of the process program model, and the limited working space and load of the robot, so as to facilitate the adjustment and improvement of the production plan. Efficiency and economic benefits, the effect of shortening the commissioning cycle
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
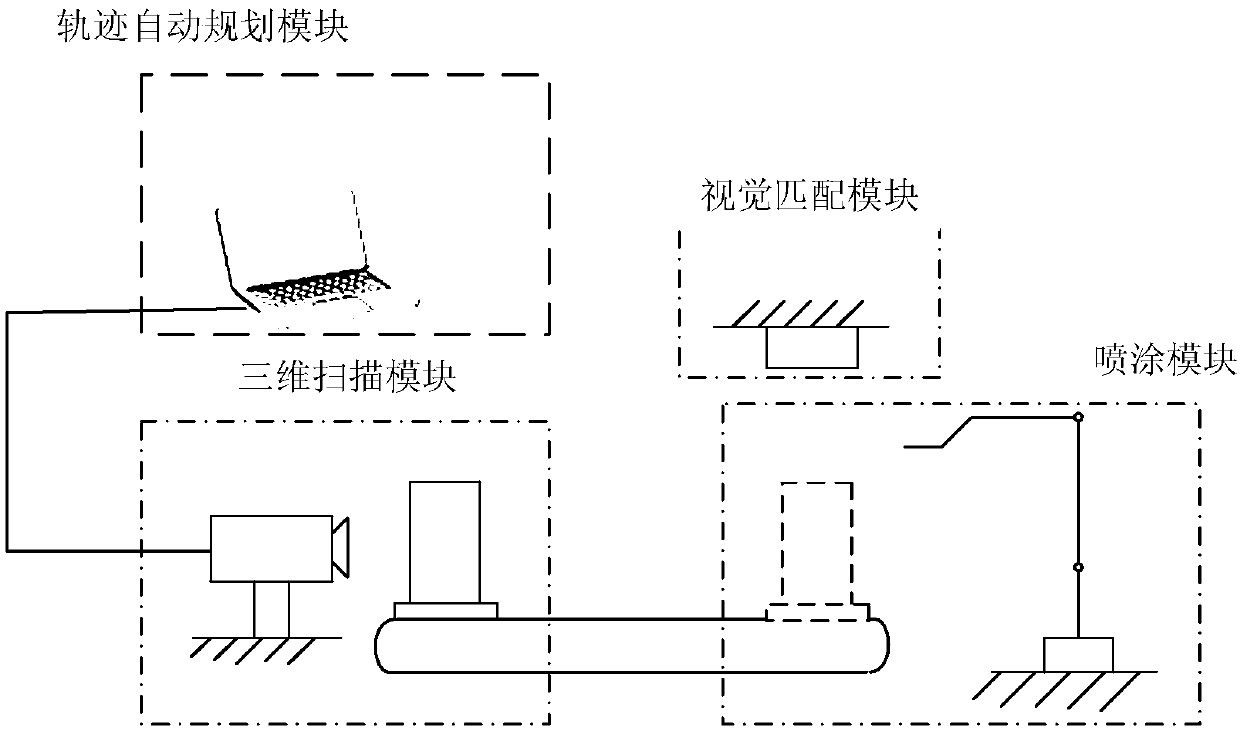
[0050] The present invention will be further described below in conjunction with accompanying drawing and embodiment: figure 1 It is a schematic diagram of the principle of the present invention.
[0051] Such as figure 1 As shown, the automatic spraying system based on point cloud and image matching in this embodiment includes
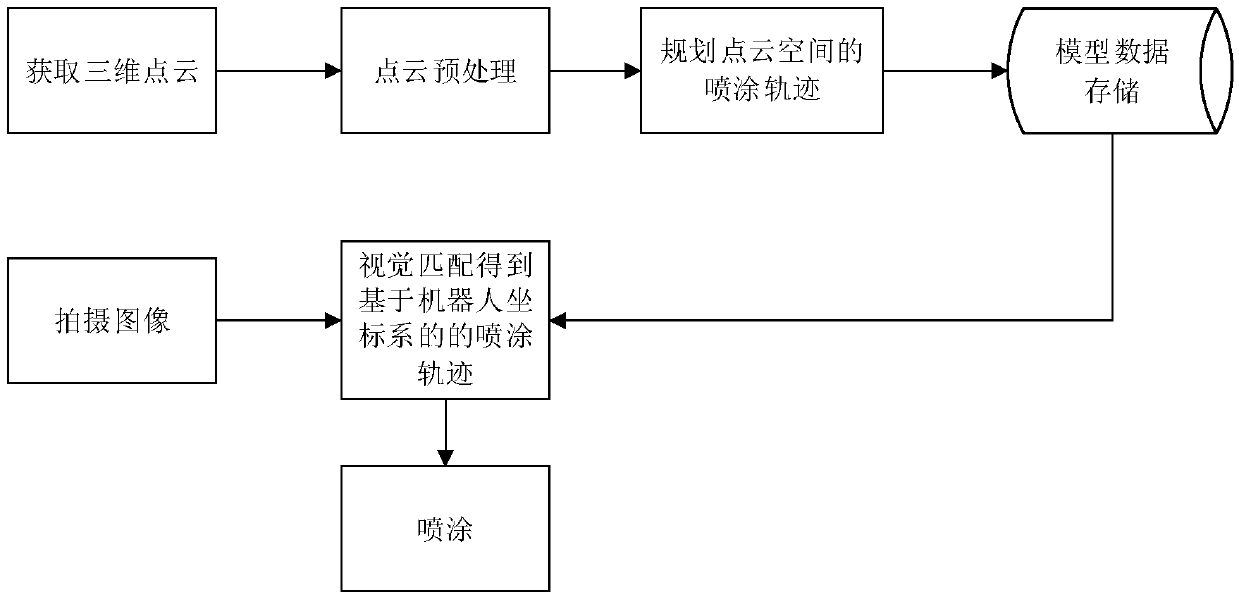
[0052] The 3D scanning module is used to scan the sprayed object and obtain the point cloud model according to the scanned 3D point cloud data,
[0053] The trajectory automatic planning module is used to plan the spraying trajectory located in the point cloud space,
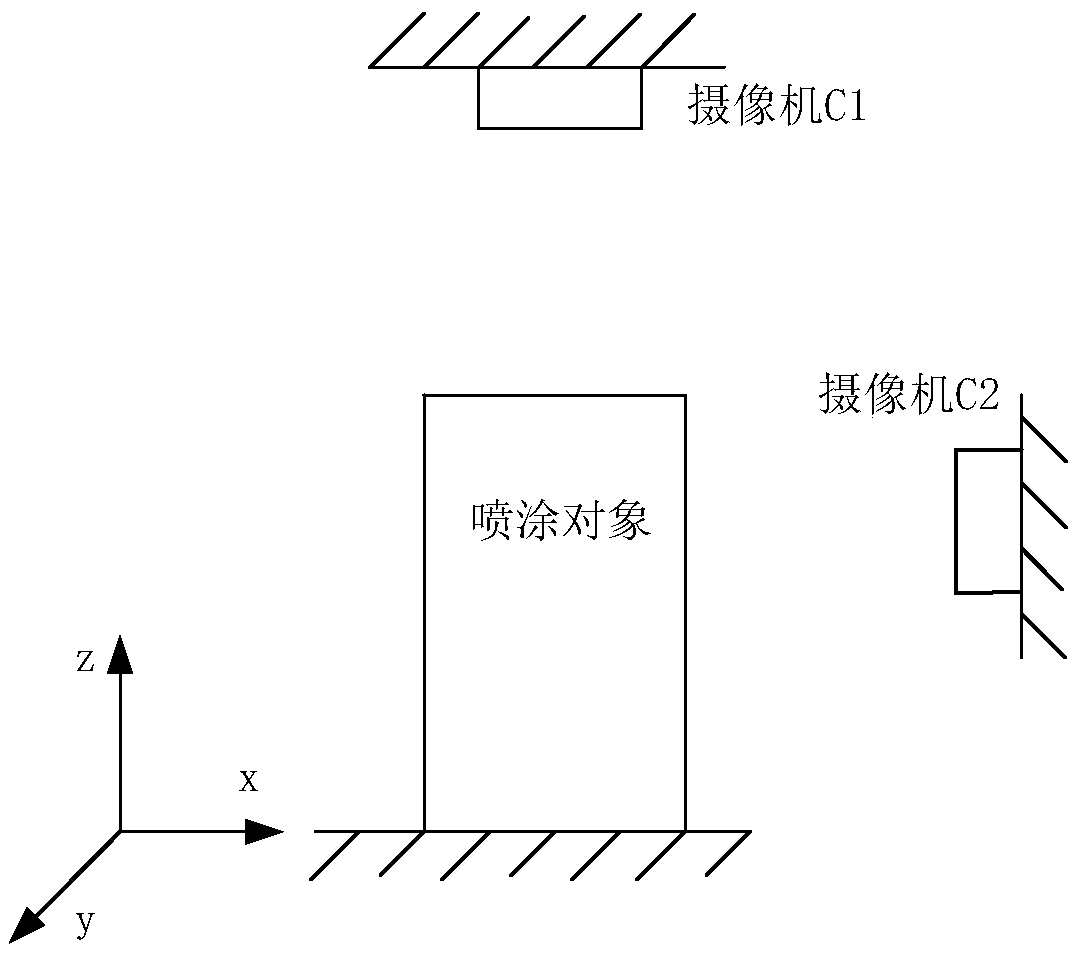
[0054] The visual matching module is used to obtain the conversion relationship between the point cloud coordinate system and the spraying robot coordinate system,
[0055] The spraying module is used for automatic spraying of spraying objects.
[0056] In this embodiment, the sprayed product is placed on the platform or on the hoisting frame, and the three-dimensional point cloud d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More