

Method for capturing non-cooperative target by virtue of space robot
A space robot and non-cooperative target technology, applied in the field of space robot control, can solve few and not extensive problems, and achieve the effect of improving the efficiency of calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
[0029] The invention provides a method for a space robot to capture a non-cooperative target, the specific steps of which include:
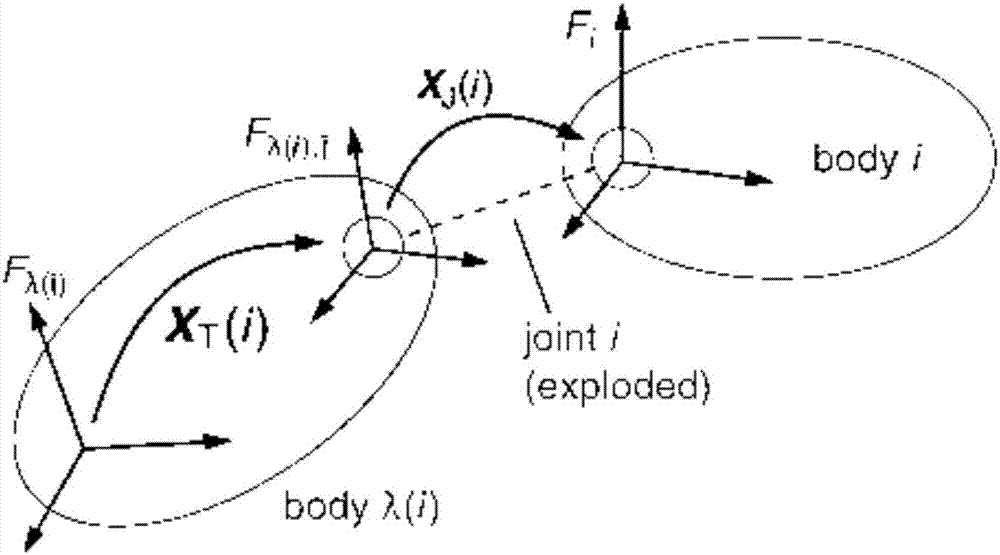
[0030] Step 1, use topology to represent the space robot; specifically use topological images and digital symbols to describe the connection relationship of rigid bodies in the space robot, and then establish the geometric model and joint model of the space robot on this basis.
[0031] The space robot is set as a multi-arm robot; space vectors are used to represent the motion of the rigid body of the space robot and the angular motion items and line motion items of the force. One space vector can complete the work of two 3-dimensional vectors, and the space vector representation The formula can replace 2 or more 3-dimensional vector formulas; the space velocity and space force of the space robot are respectivel...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More